
Date de publication: 2024.10.25
Table des matières
- 1.0 Introduction
- 2.0 Contexte
- 3.0 EDRVL
- 4.0 Données d’EDRVL
- 5.0 Déclencheurs d’événements d’EDRVL
- 6.0 Événements d’EDRVL
- 7.0 Couverture de MCE de FÉO actuelle d’EDRVL
- 8.0 Accès aux EDRVL
- 9.0 Survivabilité d’un EDRVL
- 10.0 Données des EDRVL comme éléments de preuve
- 11.0 Formation relative aux EDRVL
- 12.0 Pratiques exemplaires
- 13.0 Lignes directrices
- 14.0 Résumé et voie à suivre
- 15.0 Remerciements
- 16.0 Références
- 17.0 Avis de non-responsabilité
Page des documents relatifs au rapport technique
- No du rapport
T8080-210526 MSSC - Date du rapport
31 mars 2023 - Date de publication
23 juillet 2024 - Titre et sous-titre
Enregistreur de données routières des véhicules lourds : Pratiques exemplaires - Livrables
Enregistreurs de données routières pour les véhicules lourds: Pratiques exemplaires - Code de l’organisation responsable
- Auteur(s) : Wesley Grimes, John Grindey, Bradley Higgins, John Isbister, John Kolter, Kristina Lombardi, Henry Ramirez, Henry Schmoker et John Steiner de Mecanica Scientific Services Corporation; Steven Anderson; Jean-Louis Comeau
- Numéro de rapport de l’organisation responsable
T8080-210526 MSSC - Nom et adresse de l’organisation responsable
Mecanica Scientific Services Corp
3051 Sturgis Rd
Oxnard, California 93030 - Numéro d’unité de travail
- Numéro de contrat :
T8080-210526 - Nom et adresse de l’organisme parrain
Transports Canada
Sécurité routière et réglementation des véhicules
330, rue Sparks,
Ottawa (Ontario) Canada, K1A 0N5 - Type de rapport
- Symbole d’acheminement de l’organisme parrain
ASFCA – Enquêtes et recherche sur les collisions - Remarques supplémentaires
-
Résumé
En mai 2018, Mecanica Scientific Services Corp (Mecanica) a présenté l’Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux (dossier no T8080-160062) initiale. Sur la base de cette présentation, le document actuel T8080-210526 Enregistreurs de données routières pour les véhicules lourds : Pratiques exemplaires (pratiques exemplaires en matière d’EDRVL) vise à fournir des renseignements généraux, des références de recherche et un résumé des pratiques exemplaires et des lignes directrices pour les enregistreurs de données routières installés dans les camions, les autocars et les autobus de poids moyen et de gros tonnage. Transports Canada encourage les constructeurs de véhicules, les fournisseurs de rang 1 de moteurs, de boîtes de vitesses et de systèmes de sécurité pour véhicules, ainsi que les fabricants d’outils d’entretien, à examiner ce document et à en tirer parti lors de la conception des EDRVL ou de la mise au point d’outils d’entretien pour ces derniers.
Le présent document sur les pratiques exemplaires en matière d’EDRVL constitue également un document de référence complet pour les enquêteurs sur les collisions, les forces de l’ordre, les organismes gouvernementaux, les chercheurs et les gestionnaires de parcs de véhicules.
- Remerciements
L’équipe de recherche de Mecanica Scientific tient à remercier le lt Timothy Austin et MM. Timothy Cheek, Matt DiSogra, David Plant et Greg Wilcoxson pour leur contribution, leur expertise et leurs conseils dans le cadre de ce projet. L’équipe voudrait reconnaître et remercier l’équipe de Mecanica Scientific Services pour sa contribution relative à la publication du présent document. - Mots clés
EDR, EDRVL, enregistreur de données routières, enregistreurs de données routières pour les véhicules lourds, autobus, autobus scolaire, autocar, véhicule de poids moyen, véhicule de gros tonnage, camion porteur, porteur-remorqueur, norme SAE J2728, pratiques recommandées, lignes directrices. - Énoncé de diffusion
- Classification de sécurité (du présent rapport) : non classé
- Classification de sécurité (de la présente page) : non classée
- Nombre de pages 62
- Prix
1.0 Introduction
À l’égard des véhicules lourds, l’expression « enregistreur de données routières pour les véhicules lourds (EDRVL) » sert à décrire un système électronique qui saisit et enregistre des données relatives à un événement survenu pendant le fonctionnement d’un véhicule. L’événement peut être une collision, un changement soudain de la vitesse du véhicule, un arrêt contrôlé ou non ou une défaillance détectée dans un capteur surveillé. Cette collecte de données en temps réel englobe des détails tels que la vitesse du véhicule, la position de l’accélérateur, le régime du moteur, l’état de l’embrayage, l’état des freins, l’utilisation du régulateur de vitesse, la mise en prise des ralentisseurs secondaires et divers autres paramètres de fonctionnement. Les données disponibles et leurs sources dépendent de l’année modèle du camion et du motoriste.
Les renseignements quantitatifs et objectifs enregistrés par les systèmes embarqués constituent une ressource inestimable pour les fabricants d’équipements d’origine (FÉO) et les fournisseurs de rang 1, les enquêteurs sur les collisions et les forces de l’ordre, les organismes gouvernementaux et les chercheurs, ainsi que les gestionnaires des parcs de véhicules.
Les FÉO et les fournisseurs de rang 1 peuvent utiliser les données des EDRVL pour évaluer les caractéristiques de rendement de leurs produits lors d’accidents en situation réelle. Ces données leur permettent de déterminer les points à améliorer, de renforcer les dispositifs de sécurité et d’affiner la conception des véhicules afin de répondre à des normes plus strictes en matière de sécurité et de rendement.
Les enquêteurs sur les collisions et les forces de l’ordre peuvent utiliser les données des EDRVL comme éléments de preuve à l’appui dans le cadre d’une analyse de reconstitution d’accident. Ces données sont devenues de plus en plus importantes en raison de l’intégration de systèmes d’atténuation des collisions comme les freins antiblocage (ABS), le système antipatinage, le contrôle électronique de stabilité, le freinage d’urgence automatique et la direction dynamique avec assistance au maintien de la trajectoire.
Les organismes gouvernementaux et les chercheurs peuvent utiliser les données regroupées provenant de nombreux EDRVL en tant que ressource précieuse à des fins de recherche et d’analyse approfondies en matière de sécurité. En cernant les tendances dans les données sur les accidents, on peut formuler des stratégies visant à réduire ces derniers, à améliorer l’infrastructure routière et à perfectionner les systèmes de sécurité des véhicules.
Les gestionnaires de parcs de véhicules peuvent exploiter les données des EDRVL pour mieux comprendre le comportement des conducteurs, les besoins d’entretien des véhicules et le respect du règlement. Ces renseignements peuvent être utilisés pour fournir une rétroaction et une formation en temps réel aux conducteurs, ce qui se traduit par des pratiques de conduite plus sûres et une amélioration de la sécurité globale des parcs de véhicules.
Les données saisies par ces dispositifs offrent des indications précieuses aux différents intervenants. Il est important d’assurer la normalisation des EDRVL, car cela favorise la cohérence des données collectées à partir de ces dispositifs. Le rapport sur les Enregistreurs de données routières pour les véhicules lourds : Pratiques exemplaires (EDRVL: pratiques exemplaires) fournit des recommandations et des conseils détaillés et complets pour la normalisation et la mise en œuvre des EDRVL.
1.1 Objectif
En mai 2018, Mecanica Scientific Services Corp. (Mecanica) a publié l’Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux (dossier no T8080-160062) initiale. Cette étude examinait la faisabilité de l’introduction d’un règlement sur les EDRVL pour les autocars, les autobus et les autobus scolaires. Elle a permis de déterminer qu’il n’y avait pas d’obstacles techniques à la mise en œuvre et à la normalisation des EDRVL.
L’industrie a évolué vers la normalisation des EDRVL en suivant les pratiques recommandées décrites dans la norme SAE J2728, sans qu’il soit nécessaire d’adopter un règlement officiel. Depuis l’année modèle 2000, la majorité des camions et des autobus commerciaux sont équipés d’EDRVL fournis par les FÉO et capables d’enregistrer un grand nombre de données. Ces EDRVL fournis par les FÉO utilisent des modules de commande électronique (MCE), des réseaux de communication et des capteurs équipés en usine.
Bien que la normalisation ait progressé, certaines lacunes persistent. Celles-ci comprennent, sans toutefois s’y limiter, des difficultés d’accès aux données des EDRVL, la dispersion de la fonctionnalité entre plusieurs MCE, la perte potentielle de données en cas d’incendie ou de perte d’énergie électrique et l’absence d’horloge commune synchronisée pour l’ensemble des sources de données enregistrées.
Transports Canada encourage les FÉO à adopter les pratiques exemplaires et les lignes directrices décrites dans le présent rapport afin de remédier aux incohérences actuelles des EDRVL que l’on trouve dans la grande majorité des camions et autobus de poids moyen et de gros tonnage en Amérique du Nord. Cela garantira l’exactitude, la fiabilité et la cohérence des données et des pratiques de collecte de données dans divers véhicules et diverses administrations. En fin de compte, cet effort améliorera la sécurité et permettra des avancées dans les industries du camionnage et du transport par autobus. Il est impératif que les FÉO supervisent efficacement la normalisation des EDRVL pour assurer la réussite de leur mise en œuvre.
1.2 Portée
Ces pratiques exemplaires et lignes directrices visent principalement les EDRVL des FÉO que l’on trouve généralement dans les véhicules des classes 3 à 8, qui pèsent plus de 4 536 kg (10 000 lb) et sont équipés du bus de communication série SAE J1708/J1587 ou du bus de communication CAN J1939. Les EDRVL spécifiques des FÉO couverts par les présentes pratiques exemplaires et lignes directrices se trouvent généralement dans les MCE des FÉO des camions ou des autobus lourds, notamment le:
- MCE du moteur;
- MCE du châssis/cabine;
- MCE du système de sécurité.
Ces pratiques exemplaires et lignes directrices ne concernent pas les technologies de gestion de parcs de véhicules du marché secondaire qui enregistrent systématiquement des données, telles que les enregistreurs de trajet, les dispositifs de consignation électronique (DCE) pour les heures de service des conducteurs, les dispositifs télématiques GPS ou les enregistreurs de données vidéo (caméras-témoins).
Ces dispositifs du marché secondaire sont installés par les parcs commerciaux ou les propriétaires-exploitants après qu’ils ont pris livraison de leur camion ou autobus lourd. Il peut s’agir de dispositifs simples en vente libre qui stockent en interne les données enregistrées dans leur propre mémoire ou de dispositifs de parc d’entreprise qui intègrent une connectivité cellulaire 4G, 5G ou LTE, transmettant les données pour être stockées dans le nuage.
1.3 Élaboration de ces pratiques exemplaires et lignes directrices
L’élaboration des pratiques exemplaires relatives aux EDRVL a fait l’objet d’un processus complet comprenant une recherche et une analyse approfondies de la littérature et des rapports techniques existants. Les lignes directrices ont été élaborées en suivant les étapes suivantes :
- Recherche et collecte de données : un examen approfondi des rapports de recherche, des rapports techniques et des publications relatifs à la technologie des EDRVL a été effectué. Cette recherche s’est concentrée sur divers aspects tels que la précision, la fiabilité et les limites des données, ainsi que sur l’impact des enregistreurs de données routières (EDR) et des EDRVL sur la sécurité routière et l’exploitation des parcs de véhicules commerciaux.
- Examen des activités réglementaires: les lignes directrices ont pris en compte le paysage réglementaire actuel propre aux EDRVL et aux autobus, autocars et autobus scolaires. L’examen a porté sur les activités réglementaires aux États-Unis et dans l’Union européenne concernant l’installation des EDR dans les véhicules légers ainsi que les véhicules de poids moyen et de gros tonnage.
- Examen des pratiques recommandées existantes en matière d’EDR et d’EDRVL: cette étape consistait à évaluer les pratiques exemplaires établies, telles que les EDR de la norme SAE J1698 propres aux applications des équipements d’origine des véhicules de tourisme légers et les EDRVL de la norme SAE J2728 pour véhicules lourds (juin 2020) propres aux véhicules lourds terrestres à roues.
- Collaboration avec les experts de l’industrie : des experts dans le domaine de la technologie des EDRVL, de la sécurité des véhicules commerciaux et des domaines connexes ont été consultés au cours du processus d’élaboration. Leurs points de vue et leur expertise ont contribué à façonner les lignes directrices et à assurer leur pertinence et leur efficacité.
S’appuyant sur l’achèvement de cet effort, Transports Canada, en collaboration avec Mecanica, a inclus des renvois avec liens dans l’annexe A des pratiques exemplaires relatives aux EDRVL. En outre, les renvois de la publication initiale de l’Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux publiée en mai 2018 ont été mis à jour afin d’inclure des études, des rapports et des avancées technologiques plus récents. Ces mises à jour sont accessibles sur le site Web de l'étude de faisabilité des enregistreurs de données d'événements de véhicules lourds (HVEDR).
Les FÉO devraient examiner le rapport sur les pratiques exemplaires relatives aux EDRVL, ainsi que la collection complète d’études techniques évaluées par les pairs fournie dans l’Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux de 2018. Cette mine de renseignements peut constituer une ressource précieuse pour les FÉO afin d’établir des normes industrielles concernant la technologie des EDRVL.
1.4 Utilisation prévue
Les pratiques exemplaires relatives aux EDRVL ont été créées dans le but d’offrir un document structuré qui comprend un contexte historique, des renseignements généraux et une vaste compilation des recherches sur les EDRVL. Les pratiques exemplaires relatives aux EDRVL fournissent des recommandations et des orientations à l’égard des EDRVL aux principaux intéressés suivants :
- les concepteurs et les constructeurs de camions et d’autobus de poids moyens et de gros tonnage;
- les fournisseurs de rang 1 de moteurs, de boîtes de vitesses et de systèmes de sécurité pour véhicules lourds;
- les fabricants d’outils d’entretien qui pourraient élaborer un outil commun d’imagerie (extraction) des données pour les EDRVL.
Les documents sur les pratiques exemplaires relatives aux EDRVL servent également d’ouvrage de référence complet pour les entreprises de camionnage et de transport par autobus qui exploitent des camions, des autocars et des autobus de poids moyen et de gros tonnage équipés d’un EDRVL. En outre, il fournit des renseignements précieux aux utilisateurs finaux potentiels qui pourraient avoir besoin d’accéder aux données des EDRVL en cas d’accident de la route ou de tout autre incident inhabituel mettant en cause un véhicule et devant faire l’objet d’une enquête. Ces utilisateurs finaux comprennent les organismes gouvernementaux, les chercheurs, les directeurs des parcs de véhicules, les forces de l’ordre et les reconstitutionnistes d’accidents.
2.0 Contexte
2.1 Sécurité générale des routes au Canada
En 2020, le Canada comptait plus de 38 millions d’habitants et près de 26 millions de véhicules immatriculés. Les collisions mettant en cause ces véhicules ont fait environ 104 286 blessés et 1 746 décès. Selon la Base nationale de données sur les collisionsFootnote 1 (BNDC) gérée par Transports Canada, 285 personnes en moyenne sont blessées et 5 personnes décèdent chaque jour sur les routes canadiennes.
Dans le Code canadien de sécuritéFootnote 2 pour les transporteurs routiers, un véhicule commercial lourd est défini comme suit : « ... un camion, un tracteur ou une remorque ou toute combinaison de ces derniers dont la masse en charge inscrite excède 4 500 kg » ou à l’exclusion de son utilisation à des fins personnelles, un autobus conçu et utilisé pour le transport de passagers et dont la capacité prévue est de plus de 10 personnes, conducteur y compris. »
Sur les 1 746 décès causés par des accidents de la route survenus en 2020, 317 (18,2 %) mettaient en cause un véhicule commercial lourd. La ventilation de ces 317 décès est la suivante : 212 (67 %) étaient des occupants de l’autre véhicule, 47 (15 %) étaient des occupants du véhicule commercial lourd et 58 (18 %) étaient des non-occupants. De 2011 à 2020, les véhicules commerciaux représentaient environ 9 % de tous les véhicules en cause dans des collisions, mais ils étaient en cause dans environ 18 % de tous les décès d’usagers de la route.
Les pourcentages de victimes mortellement blessées dans des collisions mettant en cause des véhicules commerciaux par type d’usagers de la route de 2011 à 2020 sont indiqués ci-dessous dans le tableau 1. (Source : Sécurité routière au Canada 2020Footnote 3)
| Année | Occupants de véhicules utilitaires | Occupants d’autres véhicules | Piétonnes | Cyclistes |
|---|---|---|---|---|
| 2011 | 15.7 | 69.6 | 12.6 | 2.1 |
| 2012 | 17.5 | 67.2 | 11.6 | 3.7 |
| 2013 | 16.3 | 66.7 | 12.6 | 4.4 |
| 2014 | 13.8 | 72.4 | 11.4 | 2.4 |
| 2015 | 11.5 | 76.5 | 10.2 | 1.8 |
| 2016 | 15.3 | 67.8 | 13.4 | 3.5 |
| 2017 | 16.9 | 68.5 | 11.9 | 2.7 |
| 2018 | 19.8 | 63.3 | 14.2 | 2.7 |
| 2019 | 12.9 | 70.6 | 13.7 | 2.8 |
| 2020 | 14.8 | 66.9 | 14.8 | 3.5 |
Bien qu’il n’existe pas de mesure plus importante ou plus précieuse que la tragédie de la perte de vies humaines, ce n’est pas la seule mesure d’après laquelle l’importance des accidents de véhicules commerciaux peut être quantifiée. L’impact économique doit également être pris en compte. Les chargements de grande valeur comme les produits pharmaceutiques, les fournitures médicales, les appareils électroniques, les pièces d’automobile, les produits chimiques, les vêtements haut de gamme et les produits de luxe peuvent être endommagés ou détruits lors d’accidents de véhicules commerciaux, ce qui entraîne des pertes économiques importantes pour les entreprises touchées. En outre, de tels accidents peuvent perturber les chaînes d’approvisionnement et entraîner des retards ou des annulations de livraison, ce qui peut avoir des répercussions sur l’ensemble de l’économie.
En outre, certains types d’accidents de véhicules commerciaux comme ceux mettant en cause des matières ou des carburants dangereux peuvent causer des dommages importants aux infrastructures ou à l’environnement, ce qui entraîne des coûts de nettoyage élevés. Même dans les cas où il n’y a pas de blessés ou de décès, l’impact économique de ces accidents peut être important.
En 2020, le coût social des collisions de véhicules automobiles au Canada a été estimé à environ 36 milliards de dollars, soit l’équivalent d’environ 99 millions de dollars par jour (en dollars de 2010). Le coût social englobe deux éléments principaux: les coûts humains et les autres coûts. Les coûts humains comprennent les dépenses associées aux décès, aux handicaps et aux blessures non invalidantes, tandis que les autres coûts comprennent les dommages aux véhicules, les soins de santé, les véhicules d’urgence, les dépenses personnelles et les retards de circulation.
Par conséquent, bien que la perte de vies humaines constitue certainement la conséquence la plus tragique des accidents de véhicules commerciaux, il est important de prendre également en compte l’impact économique afin de comprendre pleinement leur importance.
2.2 Facteurs techniques pour les EDRVL
Pour répondre aux exigences plus strictes en matière d’émissions, les porteurs-remorqueurs construits autour de l’an 2000 pouvaient être équipés de deux ou trois MCE, de 50 à 75 capteurs et d’un bus de communication série. En revanche, les porteurs-remorqueurs modernes construits aujourd’hui peuvent compter plus de vingt MCE en boucle fermée et plus d’un millier de capteurs, relais et passerelles. Ces composants fonctionnent sur divers bus de communication CAN à grande vitesse, publics ou propriétaires. L’augmentation du nombre de capteurs et de la complexité des réseaux de véhicules est illustrée dans la figure 1 ci-dessous.
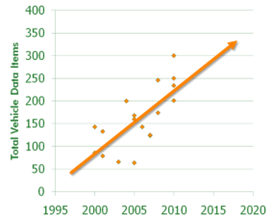
Figure 1: Éléments de données des véhicules par année modèleFootnote 4.
Les données des EDRVL déclenchées par un événement ou un accident peuvent être enregistrées, consultées, conservées et analysées afin de fournir aux enquêteurs des renseignements précieux sur les moments qui précèdent, accompagnent et suivent un accident. Ces données comprennent, sans toutefois s’y limiter, les données d’entrée du conducteur telles que la position de la pédale d’accélérateur, l’état des freins, l’application de l’embrayage et les données d’entrée de la direction, ainsi que les données relatives à l’utilisation par le conducteur de systèmes tels que le régulateur de vitesse et d’autres dispositifs de commande de la vitesse comme les freins moteur ou les ralentisseurs.
Les camions et les autobus lourds sont équipés de systèmes supplémentaires que les conducteurs peuvent utiliser pour améliorer la commande et la sécurité lorsqu’ils conduisent ces véhicules sur des routes montagneuses. Par exemple, les freins moteur ou les ralentisseurs secondaires peuvent générer des forces de ralentissement substantielles au niveau des roues motrices, ce qui permet aux conducteurs commerciaux de gérer la vitesse du véhicule lors de la descente d’une pente montagneuse sans dépendre uniquement des freins de base. Il est toutefois important de noter que l’utilisation de ces ralentisseurs lorsque les conditions routières sont défavorables et que la chaussée est glissante, notamment lorsqu’elle est mouillée, enneigée ou glacée, peut potentiellement entraîner la perte de maîtrise du véhicule. Sans EDRVL, il n’existe actuellement aucun moyen de déterminer si l’utilisation d’un ralentisseur a contribué à un accident, à moins de se fier aux déclarations du conducteur.
L’accident d’autocar survenu le 21 décembre 1999 près de Canon City, dans le Colorado, est un exemple concret d’accident majeur mettant en cause un autocar. Il a fait l’objet d’une enquête du National Transportation Safety Board (NTSB). L’accident s’est produit lorsqu’un autocar Setra 1999 s’est emballé en descendant un col de montagne. Il a alors quitté la route, s’est renversé et 53 passagers ont été éjectés du véhicule. Malheureusement, deux passagers ont perdu la vie et 51 autres ont été blessés dans l’accident. Le NTSB a indiqué que son équipe d’enquêteurs a pu accéder aux données et imager celle-ci à partir du MCE du moteur Detroit Diesel Series 60 DDEC IV du Setra 1999 et récupérer les données routières enregistrées à la suite de cet accident. Les données du DDEC IV indiquaient qu’un survirage de l’autocar a été provoqué par l’utilisation inadéquate des ralentisseurs secondaires (freins moteurs) par le conducteur alors que la chaussée était glissante. Sans la présence d’un EDRVL à bord du Setra 1999, il n’y aurait pas de source d’élément de preuve concrète et indépendante permettant de déterminer que l’utilisation d’un système tel qu’un ralentisseur secondaire a été l’une des causes principales de cet accident. Pour plus de détails, voir le rapport du NTSB, Motorcoach Run-Off-the-Road Near Canon City, Colorado, December 21, 1999, Highway Accident Brief NTSB/HAB-02/19 (Washington, DC: National Transportation Safety Board, 2002).
À mesure que les véhicules deviennent plus sûrs et sont équipés de technologies de sécurité plus avancées telles que le régulateur de vitesse adaptatif, le freinage d’urgence automatique, l’avertisseur de sortie involontaire de voie, les systèmes d’aide au maintien dans la voie et le régulateur de vitesse « autopilote » avec direction dynamique, des enregistreurs de données sont nécessaires pour comprendre et distinguer les fonctions et les interventions du véhicule des actions (ou inactions) du conducteur. En outre, comme les systèmes de sécurité tels que les freins antiblocage (ABS) sont de plus en plus répandus, il se peut qu’il n’y ait que peu de preuves matérielles, voire aucune sur une scène d’accident à documenter et à analyser.
Il est important de noter qu’aujourd’hui, la plupart des EDR ou EDRVL ne sont pas en mesure d’indiquer si le conducteur maîtrisait activement le véhicule ou si le système de conduite automatisée était intervenu et fournissait des données pour maîtriser le véhicule. À cette fin, les systèmes de stockage de données pour les véhicules automatisés (DSSAD) enregistreront des données permettant de déterminer si le conducteur maîtrisait ou non le véhicule.
Les personnes chargées de faire enquête sur les accidents de véhicules commerciaux, et de les analyser, doivent comprendre les types de données routières disponibles pour les véhicules commerciaux, comment les données sont générées, comment accéder aux données des véhicules et comment les utiliser dans le cadre de la reconstitution d’une collision. Les gestionnaires des transporteurs routiers, les experts en assurance, les gestionnaires de sinistres et les avocats qui traitent des cas de collision de véhicules bénéficieraient également de ces connaissances. Les EDRVL enregistrent généralement la vitesse du véhicule, l’utilisation des freins et les codes de diagnostic. En outre, il est possible de tirer parti des EDR et des EDRVL afin de surveiller et d’encadrer les conducteurs de véhicules commerciaux afin d’améliorer la sécurité des parcs de véhicules.
2.3 Une perspective historique
Les progrès réalisés dans les années 1990 en matière de systèmes de retenue passive des occupants des véhicules de tourisme et de leurs commandes électroniques ont jeté les bases de l’évolution ultérieure et de l’acceptation des EDR en Amérique du Nord pour les véhicules de tourisme au Canada, aux États-Unis et au Mexique. Initialement destinés aux véhicules légers, les EDR sont maintenant installés à bord des véhicules de poids moyen et de gros tonnage. Cette expansion a été motivée par le fait que les fabricants de moteurs de camions de poids moyen et de gros tonnage sont passés des commandes mécaniques ou électromécaniques classiques à des commandes électroniques à semi-conducteurs, en réponse aux exigences de 2002 de l’Environmental Protection Agency (EPA) concernant la réduction des émissions d’oxyde nitreux (NOx) des moteurs diesel. Cette transition a permis d’améliorer le rendement des moteurs et de se conformer aux exigences de l’EPA en matière d’émissions. L’adoption de commandes électroniques de moteur a également mené à l’établissement de protocoles de communication série normalisés à bord des véhicules, suivis par des protocoles de communication normalisés pour réseau de zone de contrôleur (CAN) à grande vitesse. Ces protocoles définissent le réseau physique (câblage), les protocoles de communication et les messages à l’intérieur des véhicules, jetant les bases pour les EDRVL. En juin 2010, SAE International a publié une pratique recommandée, soit la norme J2728 « Heavy Vehicle Event Data Recorder, Tier 1 », qui définit l’EDRVL dans les véhicules dont le poids nominal brut est supérieur ou égal à 4 536 kg (10 000 lb) et qui sont pourvus d’un bus de données de communication J1587 ou J1939.
L’intérêt pour les EDRVL s’est accru en raison de leur capacité à enregistrer des données cruciales concernant la dynamique des véhicules et les interventions du conducteur pendant une courte période, juste avant et après un événement déclenché, généralement en raison d’un accident ou d’un événement non lié à un accident. Ces données d’événements enregistrées fournissent des renseignements précieux combinés à des preuves matérielles, permettant aux experts de procéder à une analyse complète de la reconstitution d’accidents de véhicule. L’intégration des données des EDRVL avec les éléments de preuves des reconstitutions fournit également des renseignements précieux pour améliorer notre compréhension du rendement des systèmes de sécurité, contribuant potentiellement à des conceptions de véhicules plus sûres et à un règlement plus efficace en matière de sécurité.
La National Highway Traffic Safety Administration (NHTSA) a établi des exigences pour l’installation volontaire d’EDR dans les véhicules de tourisme légers par le biais du règlement américain 49 CFR Part 563 en août 2006. Au lieu d’imposer l’installation d’EDR, la NHTSA a opté pour une approche volontaire afin d’encourager le développement de cette technologie tout en minimisant les coûts pour les constructeurs et les consommateurs.
En janvier 2012, la NHTSA a publié la règle finale modifiant le règlement 49 CFR Part 563 pour les véhicules de tourisme légers d’un poids nominal brut d’au plus 3 856 kg (8 500 lb). Les exigences ne s’appliquent qu’aux véhicules de tourisme légers fabriqués à partir du 1er septembre 2012.
En décembre 2012, la NHTSA a publié une Notice of Proposed Rulemaking (NPRM) proposant de convertir les exigences « si installé » de la partie 563 pour les EDR en une nouvelle Federal Motor Vehicle Safety Standard (FMVSS) rendant obligatoire l’installation d’EDR dans la plupart des véhicules de tourismes légers. Au moment où elle a publié la NPRM, la NHTSA estimait qu’environ 92 % des véhicules légers de l’année modèle 2010 étaient équipés d’un quelconque EDR.
En février 2019, la NHTSA a retiré le NPRM de décembre 2012 parce qu’elle estimait qu’il était alors inutile d’imposer l’installation d’EDR à bord des véhicules de tourisme légers neufs. L’analyse interne de la NHTSA a montré que, pour l’année modèle 2017, 99,6 % des nouveaux véhicules légers vendus étaient déjà équipés d’EDR conformes aux exigences de la partie 563. Ce taux d’installation élevé a démontré que l’installation quasi universelle des EDR à bord des véhicules de tourisme légers neufs a été réalisée sans qu’il soit nécessaire de recourir à un mandat réglementaire.
En juillet 2022, la NHTSA a publié un document technique intitulé « Considerations for Regulating Installation and Performance of Heavy Vehicle Event Data Recorders (EDRVLs) » (identifiant de document NHTSA-2007-28793-0031). Les principales questions techniques examinées dans le document comprennent les types d’éléments de données à saisir, les mécanismes de déclenchement permettant de saisir les éléments de données au cours d’un événement particulier, les questions de stockage, les caractéristiques de survivabilité et les méthodes d’extraction des données.
La NHTSA a conclu qu’elle n’était pas encore prête à élaborer un règlement pour les EDRVL, citant des lacunes importantes en matière de renseignements dans les domaines de la protection de la vie privée des conducteurs, des coûts du système et des éléments de données nécessaires à l’analyse des accidents par la NHTSA. En outre, l’organisme a noté qu’il pourrait être difficile d’estimer les avantages des EDRVL, ce qui rendrait difficile la justification des coûts associés à l’obligation de les utiliser. La NHTSA estime qu’à mesure que les véhicules lourds adoptent de nouvelles technologies d’évitement des collisions et des systèmes avancés d’aide à la conduite, les considérations relatives à la disponibilité des données et au coût des systèmes peuvent changer. En outre, la NHTSA poursuit ses recherches et sa participation dans des activités internationales concernant des approches élargies d’enregistrement de données et des déclencheurs d’enregistrement de données qui peuvent soutenir de manière appropriée les analyses d’incidents qui pourraient se produire alors que les nouveaux systèmes d’automatisation de la conduite, y compris les futurs systèmes de conduite automatisée, sont activés. La NHTSA continuera à surveiller les enjeux relatifs aux EDRVL, aux normes de données connexes et aux technologies émergentes, et réexaminera la possibilité d’élaborer une proposition réglementaire à une date ultérieure.
Parallèlement aux travaux menés pour publier la règle fédérale américaine volontaire liée aux EDR, le National Transportation Safety Board (NTSB) des États-Unis a joué un rôle actif dans la promotion de la mise en œuvre des EDR. Depuis 1997, le NTSB a formulé de nombreuses recommandations concernant l’utilisation des EDR à bord des véhicules. En outre, le NTSB a organisé ou participé à six forums publics et a publié huit rapports officiels axés sur la nécessité des technologies des enregistreurs.
En 1999, le NTSB a émis les recommandations de sécurité H‑99‑53Footnote 5 et H-9 --54Footnote 6 à l’intention de la National Highway Traffic Safety Administration afin d’exiger l’installation de dispositifs de type EDR dans les autocars et les autobus scolaires. Les recommandations H-99-53 et H- -9-54 ont depuis été closes et, en 2010, le NTSB a émis deux nouvelles recommandations de sécurité, soit H- -0-14 et H- -0-15Footnote 7, qui restent ouvertes à ce jour.
Recommandation H-10-14 auprès de la NHTSA – élaborer et mettre en œuvre des normes de rendement minimales pour les EDR destinés aux camions dont le poids nominal brut est supérieur à 10 000 livres, qui portent au minimum sur les éléments suivants : paramètres de données à enregistrer, taux d’échantillonnage des données, durée de l’événement enregistré, interface d’imagerie de données normalisée ou universelle, format de stockage des données et survivabilité des dispositifs et des données en cas d’écrasement, d’impact, d’exposition à des liquides, d’immersion et d’exposition thermique. Les normes devraient également exiger que l’EDR soit capable de saisir et de préserver les données en cas de coupure ou de perte d’énergie électrique et de s’adapter aux exigences futures et aux progrès technologiques, tels que les logiciels de système d’exploitation flash ou reprogrammables ou les mises à jour de micrologiciel.
Recommandation H-10-15 auprès de la NHTSA – après avoir établi des normes de rendement pour les EDR destinés aux camions dont le poids nominal brut est supérieur à 10 000 livres, exiger que tous ces véhicules soient équipés d’EDR conformes aux normes.
L’Union européenne suit l’exemple des organismes de réglementation américains. En 2022, le nouveau règlement des Nations Unies no 160 a été introduit pour améliorer la collecte de données sur les accidents de la route en exigeant l’installation d’EDR dans les véhicules de tourisme et les fourgonnettes. À partir de juillet 2022, l’installation d’un EDR est devenue obligatoire pour les nouveaux types de véhicules de tourisme et de fourgonnettes, et d’ici juillet 2024, elle sera obligatoire pour toutes les voitures et fourgonnettes neuves. Les EDR pour les camions et les autobus lourds seront introduits en 2029.
Le secteur automobile dans d’autres pays clés a également franchi le pas. Outre l’Union européenne, le Royaume-Uni, le Japon, la Corée du Sud et la Chine, par exemple, travaillent tous activement à l’élaboration d’exigences en matière d’EDR et d’EDRVL.
3.0 EDRVL
Les EDR pour véhicules légers et les EDRVL sont souvent comparés aux enregistreurs de données de vol (EDV) utilisés dans les aéronefs de passagers, qui sont imposés par la partie 121 de la Federal Aviation Administration (FAA) des États-Unis. Cependant, il n’y a pas grand-chose en commun entre les EDV et les EDR/EDRVL, si ce n’est l’idée générale et le concept d’enregistrement des données.
L’EDV et l’enregistreur de conversations de poste de pilotage sont spécialement conçus et fabriqués avec des enregistreurs électroniques de données et de sons qui commandent et enregistrent indépendamment des centaines de canaux de données. Les données saisissent le rendement des moteurs, la position des commandes de vol, la dynamique de l’aéronef, les commandes du pilote et les enregistrements de conversations de poste de pilotage. Ces systèmes disposent de leurs propres faisceaux de câbles et de leur propre alimentation électrique pour surveiller tous les aspects de l’aéronef.
Contrairement aux EDV, les EDRVL comptent sur des capteurs et des réseaux de données préexistants qui sont essentiels au fonctionnement du véhicule. Les données qui peuvent être saisies, telles que le régime moteur, la vitesse du véhicule et la position de la pédale d’accélérateur, sont générées par des capteurs qui transmettent les données au module de commande du moteur/du groupe motopropulseur pour qu’il fasse fonctionner le moteur et la boîte de vitesses. De même, la vitesse d’entrée et la position du volant sont commandées par un capteur qui transmet les données au système de contrôle électronique de stabilité du véhicule afin de surveiller les situations dynamiques et d’aider le conducteur à conserver la maîtrise du véhicule. L’algorithme des EDRVL surveille lui-même les capteurs du véhicule et détermine quand un événement d’intérêt s’est produit et si celui-ci devrait être enregistré pour une imagerie ultérieure. L’EDR, responsable de la saisie et de l’enregistrement des données, est une fonction exécutée au sein d’un MCE. Ce MCE, qui contient l’EDRVL, remplit également d’autres fonctions primaires liées au fonctionnement du véhicule comme la protection et le diagnostic du moteur, la réduction de l’entretien, la régulation du régime moteur et de la vitesse routière, l’économie de carburant, la lutte antiémissions et d’autres tâches opérationnelles. De nature secondaire, l’EDR est conçu pour compléter les fonctions primaires du MCE.
Dans le cas d’un véhicule léger, l’EDR est généralement intégré au module de commande des coussins gonflables (MCCG) du véhicule. Le rôle principal du MCCG consiste à détecter les accidents et à déterminer s’il faut déployer les différents systèmes de protection des occupants, tels que les prétensionneurs de ceinture de sécurité, les sacs gonflables et les appuie-têtes actifs. Grâce au déploiement de ces systèmes de protection des occupants, le MCCG peut également saisir et enregistrer des données dans sa mémoire à des fins d’accès et d’imagerie (téléchargement) après une collision.
4.0 Données d’EDRVL
Il est important de comprendre la différence entre les mesures d’enregistrement et les protocoles de déclenchement des EDR des véhicules légers et les mécanismes de déclenchement d’EDRVL dans les véhicules lourds.
Les EDRVL sont généralement déclenchés par une variation de la vitesse du véhicule sur une période d’environ une seconde, mesurée par le(s) capteur(s) de vitesse des roues ou par le capteur de vitesse du véhicule (CVV) monté sur le groupe motopropulseur.
Historiquement, les premiers EDRVL que l’on retrouvait à la fin des années 1990 et au début des années 2000 exploitaient un ancien réseau de bus de données en série, aujourd’hui abandonné, tel que défini par les normes SAE J1708 (Serial Data Communications Between Microcomputer Systems in Heavy-Duty Vehicle Applications) et J1587 (Electronic Data Interchange Between Microcomputer Systems in Heavy-Duty Vehicle Applications.
Aujourd’hui, les EDRVL s’appuient sur le réseau de zone de contrôleur à grande vitesse, tel que défini par les normes SAE J1939/13 (Serial Control and Communications Heavy Duty Vehicle Network) et ISO 15765:2011 (Road vehicles Diagnostic communication over Controller Area Network [DoCAN]). D’autres réseaux de zone de contrôleur normalisés ou propriétaires peuvent également être utilisés.
Parmi les principaux capteurs utilisés comme sources primaires de données d’EDRVL enregistrées, mentionnons:
- le capteur de vitesse du véhicule – la source de la vitesse routière du véhicule.
- Il peut s’agir d’un capteur de vitesse du véhicule spécialisé monté sur l’arbre de queue de la transmission et qui mesure les rotations de l’arbre de sortie.
- Les capteurs de vitesse des roues du système de freinage antiblocage peuvent être exploités. Il est possible d’utiliser un seul capteur ou, dans la plupart des cas, deux capteurs sur le même essieu et d’établir une moyenne;
- les capteurs de position de l’arbre à cames et du vilebrequin du moteur – la source du régime du moteur;
- le capteur de position du papillon – position de la pédale d’accélérateur (en pourcentage) telle qu’elle enfoncée par le conducteur;
- l’interrupteur de freinage – utilisé pour alimenter (ou commander) l’activation des feux de freinage à l’extérieur du véhicule. Également utilisé comme source de données analogiques pour le serrage des freins de service simple (MARCHE/ARRÊT);
- l’interrupteur d’embrayage – principalement utilisé pour désactiver le système de régulateur de vitesse (s’il est activé) lorsque le conducteur appuie sur la pédale d’embrayage. Peut fournir une position analogique de l’embrayage (APPUYÉ/NON APPUYÉ);
- le capteur de position du volant – entrée primaire de l’électro-stabilisateur programmé du véhicule et fournit la position du volant en degrés positifs et négatifs selon la définition des valeurs par le FÉO ou le fournisseur de rang 1.
Veuillez noter que cette liste n’est pas exhaustive, car il existe aujourd’hui d’autres éléments de données saisis par les EDRVL dans les camions et les autobus. Pour une liste complète des éléments de données, il est recommandé de se reporter à la norme SAE J2728 (Heavy Vehicle Event Data Recorder Recommended Practice).
Le concept de base ici est que l’EDRVL ne nécessite pas nécessairement l’ajout de nouveaux MCE, réseaux ou capteurs en boucle fermée. Les systèmes préexistants sur le véhicule peuvent être utilisés aux fins de l’EDRVL, ce qui minimise ainsi l’impact financier de l’incorporation de ces systèmes.
5.0 Déclencheurs d’événements d’EDRVL
Les EDRVL s’appuient sur les changements de vitesse (delta V) mesurés par le CVV monté sur le groupe motopropulseur ou par le(s) capteur(s) de vitesse de rotation des roues comme déclencheurs d’événements.
Les différents déclencheurs d’événements dans les EDRVL peuvent être classés en deux catégories principales : les déclencheurs d’accélération (freinage dur, décélération soudaine et arrêt rapide) et les déclencheurs de dernier arrêt. Chaque constructeur de véhicules lourds met en œuvre ces déclencheurs d’événements à des degrés divers. Afin de promouvoir la cohérence et la normalisation, il existe un document de pratique recommandée, soit la norme SAE J2728 (Heavy Vehicle Event Data Recorder), qui décrit un ensemble commun d’exigences de rendement pour l’enregistrement et le stockage de données relatives à des événements spécifiques pouvant survenir lors de la conduite d’un véhicule lourd. Selon la norme SAE J2728, un EDRVL doit enregistrer un événement si l’un des ensembles de conditions suivantes se produit:
- déclencheur d’accélération – l’EDRVL est déclenché lorsque la vitesse du véhicule change à un rythme supérieur au seuil programmable fixé entre 8,0 km/h/s (5,0 mi/h/s, 7,3 pi/s/s) et 22,5 km/h/s (14,0 mi/h/s, 20,5 pi/s/s). Ce changement de vitesse peut être positif ou négatif et doit persister au-delà du seuil pendant au moins 0,5 seconde. L’événement d’accélération commence au moment où le seuil est franchi. Le seuil par défaut recommandé est de 11,3 km/h/s (7,0 mi/h/s);
- déclencheur de dernier arrêt – l’EDRVL est déclenché lorsque la vitesse du véhicule chute en dessous de 3,0 km/h (1,9 mi/h) pendant 15 secondes ou plus. Le dernier événement d’arrêt démarre au moment où le seuil est franchi. Pour éviter que les événements du dernier arrêt ne soient écrasés par le mouvement du véhicule après un incident d’intérêt, le dernier déclencheur le plus élevé ne peut pas se reproduire tant que la vitesse du véhicule n’atteint pas 24,0 km/h (14,9 mi/h) ou plus pendant un minimum de 6 secondes. Le fait de couper le contact ne déclenche pas directement un événement de dernier arrêt.
Il est important de noter que le déclencheur d’accélération défini pour les EDRVLde 8,0 km/h/s (5,0 mi/h/s, 7,3 pi/s/s) et de 22,5 km/h/s (14,0 mi/h/s, 20,5 pi/s/s) est équivalent à un freinage de 0,23 à 0,63 g. Ces valeurs de freinage pour déclencher un événement d’EDRVL déclenché par l’accélération se sont avérées efficaces pour les véhicules de poids moyens et de gros tonnage, dont le système de freinage de base consiste en des freins à air.
Le déclencheur d’accélération pour les EDRVL de 0,23 à 0,63 g de freinage appliqué aux véhicules de poids moyen équipés de freins de base hydrauliques sera trop sensible et entraînera l’enregistrement d’un nombre excessif de faux positifs. Cela pourrait entraîner des cycles de lecture-écriture excessifs du MCE hôte de l’EDRVL et provoquer une défaillance prématurée de la mémoire.
Il est recommandé que cette question soit réexaminée par le comité SAE J2728 et qu’une autre solution pour les déclencheurs d’événements soit envisagée pour les véhicules de poids moyen équipés de freins de base hydrauliques. Cela s’ajouterait à la pratique recommandée J2728 actuelle selon laquelle le déclencheur d’accélération et le déclencheur de dernier arrêt s’appliquent aux véhicules équipés des communications par bus série SAE J1587/J1708 ou par bus CAN J1939.
Ces événements sont déclenchés et saisis différemment selon les fabricants, Les déclencheurs, la durée d’enregistrement et la fréquence d’enregistrement des EDRVL des FÉO sont indiqués ci-dessous dans le tableau 2.
| Daimler Trucks North America Detroit Diesel/Mercedes-Benz |
groupe Volvo Amérique du Nord. (Mack, Volvo, Volvo Bus/Prevost) |
Caterpillar | |
|---|---|---|---|
| Moteur/modules | DDEC 16 (CPC04T) et Mercedes OM471 | Mack V-MAC IV+ commandes Volvo version 3 | CAT C15 EPA 07; module ADEM IV |
| Année | 2016 à ce jour | 2013 à ce jour | 2010 |
| Durées d’enregistrement |
Frein à main: 1 min (avant), 15 s (après) dernier arrêt : 1 min 44 s (avant), 15 s (après) |
Accélération déclenchée : 1 min (avant), 30 s (après) dernier arrêt : 9 s |
44 s (avant), 15 s (après) |
| Fréquence d’enregistrement | 1 Hz | 4 Hz | 1 Hz |
| Déclencheur de freinage dur | Réglé en usine à 7 mi/h/s; configurable par le propriétaire | +/- 10 mi/h/s | Réglé en usine à 7 mi/h/s; configurable par le propriétaire |
| Déclencheur de dernier arrêt |
La vitesse du véhicule passe de plus de 1,5 mi/h à moins de 1.5 mi/h et le véhicule est arrêté pendant 15 s |
0 mi/h/s | S. O. |
| Déclencheur conditions | La vitesse du véhicule doit être supérieure à 10 mi/h; aucun déclenchement si précédé ou suivi d’une accélération de plus de 4 mi/h/s. | Pas de conditions de déclenchement pour les événements déclenchés par l’accélération. L’écriture du dernier arrêt exige que le véhicule dépasse 5 km/h (3,1 mi/h). | Pas de conditions particulières. |
| Navistar International | Cummins | PACCAR | Bendix | |
|---|---|---|---|---|
| Moteur/ modules | Navistar A26 | Moteur X15; CM 2350 | Moteur MX-11 (EPA 2013) | Module EC-80 |
| Année Durées d’enregistrement |
2018 à ce jour 105 s (avant), 15 s (après) |
2017 à ce jour 59 s (avant), 15 s (après) |
2010 à 2017 | 2011 et années suivantes |
|
5 s (avant), 5 sec (après) |
10 s (avant), 10 sec (après) |
|||
| Fréquence d’enregistrement | 1 Hz | 1 Hz | 4 Hz | 2 Hz |
| Déclencheur de freinage dur | 7.4 mi/h/s | 9 mi/h/s | 8.95 mi/h/s |
0,55 g déclenche les données Bendix Journal de l’enregistreur; 0,75 g déclenche et verrouille |
| Déclencheur de dernier arrêt | Le véhicule s’arrête et le moteur est coupé, ou le véhicule s’arrête et le moteur reste au ralenti pendant plus de 2 min. | S. O. | S. O. | S. O. |
| Conditions de déclenchement | Des vitesses de véhicules minimales peuvent être nécessaires; en cours de détermination. | 9 mi/h/s par défaut; la plupart ne sont pas programmables. | S. O. | Lorsque l’amplitude de l’accélération latérale ou longitudinale dépasse 0,5 g dans n’importe quelle direction. (Accélération > 0,5 g); lorsque la vitesse du véhicule est réduite de 6,9 mi/h ou plus en 1 s (freinage dur); lorsqu’il y a une intervention de freinage du système Wingman Advanced; lorsque le régulateur de vitesse actif avec freinage est activé et que l’alerte de prise de contrôle (ou l’alerte d’impact) et le conducteur sont en train de contourner le système. |
Outre les déclencheurs d’accélération et les déclencheurs de dernier arrêt, un événement déclenché de l’extérieur permet au conducteur de lancer manuellement le processus d’enregistrement. Cela permet au conducteur d’un véhicule lourd de déclencher manuellement un événement d’EDRVL en appuyant sur un ou plusieurs interrupteurs sur le tableau de bord. L’idée d’un événement d’EDRVL à déclenchement externe n’est pas nouvelle et a été mise en œuvre par plusieurs FÉO de châssis et fournisseurs de moteurs. Un exemple notable est celui de Caterpillar, qui a introduit la possibilité pour le conducteur de déclencher un « instantané externe » des données dans ses véhicules commerciaux motorisés dès la fin des années 1990. À bord des véhicules Caterpillar, le conducteur pourrait déclencher un instantané externe en faisant basculer l’interrupteur à levier à trois positions « SET/RESUME » (régler/reprendre) du régulateur de vitesse de la position « Center/Off » (centre/arrêt) à la position « SET » (régler), puis à la position « RESUME » (reprendre) dans un délai d’une seconde. Cette action permettrait d’enregistrer un instantané des données stockées dans la mémoire du MCE du moteur de Caterpillar, qui contient 13 secondes de données du moteur (9 secondes avant le déclenchement et 4 secondes après celui-ci). Le MCE de Caterpillar était capable de stocker les quatre derniers instantanés externes déclenchés. Des renseignements détaillés sur le déclencheur externe de Caterpillar sont présentés dans la figure 2 ci-dessous.
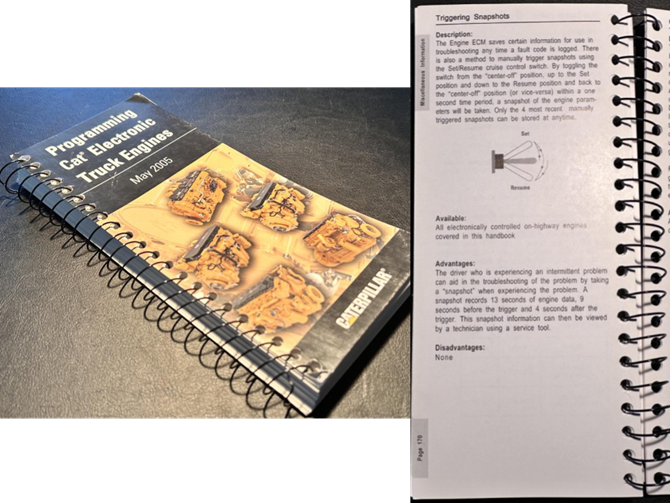
Figure 2: Instantanés des déclencheurs externes de Caterpillar
Caterpillar incorporated est un leader dans la fabrication de moteurs diesel. L'image à gauche représente la page de couverture d'un manuel d'instructions de Caterpillar intitulé "Programming Cat Electronic Truck Engines" datant de mai 2005. L'image à droite est la page 170 du manuel Caterpillar, indiquant que dans les véhicules Caterpillar, l'opérateur pourrait déclencher une capture instantanée externe en basculant l'interrupteur à trois positions "Set / Resume" du régulateur de vitesse de la position "Centre / Off" à la position "Set", puis à la position "Resume" en une seconde. Cette action permettrait de stocker une capture instantanée des données enregistrées dans la mémoire de l'unité de contrôle électronique du moteur Caterpillar, contenant 13 secondes de données moteur (9 secondes avant le déclenchement et 4 secondes après le déclenchement). L'unité de contrôle électronique Caterpillar était capable de stocker les quatre dernières captures instantanées externes déclenchées.
Outre Caterpillar, d’autres fabricants de moteurs ou de châssis, tels que PACCAR et Cummins, ont également mis en œuvre la fonctionnalité des déclencheurs externes par le passé.
PACCAR a introduit la fonction Snapshot Recorder, qui permettait au conducteur de déclencher manuellement un événement d’enregistrement. Des détails sur le déclenchement de l’instantané sont disponibles dans le logiciel de diagnostic (DAVIE4) et dans la bibliothèque technique (Engine Rapido) de PACCAR. Trois événements d’enregistreur d’instantanés seront stockés, contenant 10 secondes avant et 5 secondes après le déclenchement.
Les ordinateurs de route Celect RoadRelay 4 et 5 de Cummins montés sur le tableau de bord permettaient au conducteur de lancer manuellement le processus d’enregistrement en appuyant sur un ensemble de boutons pour enregistrer l’événement.
6.0 Événements d’EDRVL
Dans le marché nord-américain actuel des camions et des autobus de poids moyens et de gros tonnage, on peut retrouver des quantités importantes de données spécifiques et non spécifiques à un événement dans les MCE grâce au logiciel de diagnostic respectif du véhicule pour le groupe motopropulseur (moteur et boîte de vitesses), les émissions, le châssis et les commandes de systèmes de sécurité (freins antiblocage, système antipatinage, contrôle électronique de stabilité et systèmes avancés d’aide à la conduite). Qu’entend-on par données spécifiques à un événement et données non spécifiques à un événement? Les rapports de données peuvent être classés selon qu’ils sont déclenchés pour être enregistrés en réponse à un incident, une condition ou un événement spécifique ou qu’ils sont saisis en continu. Ces deux catégories de données sont définies et expliquées ci-dessous.
Un exemple d’enregistrement spécifique à un événement est un « événement de freinage dur » déclenché par un changement détecté de la vitesse du véhicule mesurée au niveau des roues motrices, comme nous l’avons vu précédemment. Cet événement peut entraîner l’enregistrement d’un « enregistrement de freinage dur » par le MCE, comme indiqué dans la section sur les déclencheurs d’événements d’EDRVL. Un autre exemple d’enregistrement spécifique à un événement est un code de diagnostic qui est enregistré par le MCE pertinent lorsqu’un défaut est détecté au niveau du bus CAN, d’un capteur ou lorsqu’un capteur détecte que le composant ou le système surveillé n’est pas conforme aux paramètres prédéterminés par le fabricant. Par exemple, un paramètre de fonctionnement hors plage peut être la température du liquide de refroidissement du moteur qui dépasse la température maximale de fonctionnement en toute sécurité en raison d’une surchauffe du moteur. Outre le stockage des données des codes de diagnostic dans la mémoire du MCE en vue d’une imagerie ultérieure, le MCE fournit également des avertissements au conducteur en activant les témoins d’anomalie, en affichant des messages électroniques sur les écrans numériques des tableaux de bord ou en émettant des avertissements sonores.
Les données non spécifiques à un événement englobent divers types de données, notamment les paramètres de programmation et les données relatives aux déplacements. Le tableau 3 ci-dessous présente un résumé des enregistrements spécifiques et non spécifiques à un événement.
| Données non spécifiques à un événement | ||
|---|---|---|
| Type de données (MCE) | Description | Remarques |
| Paramètres de programmation (groupe motopropulseur, émissions, cabine/commandes, systèmes de sécurité) | Paramètres de configuration du véhicule, y compris les limiteurs de vitesse, les paramètres du régulateur de vitesse, les paramètres de puissance du moteur, les étalonnages des injecteurs diesel, les étalonnages du capteur de vitesse du véhicule, l’éclairage, les configurations des commandes de la cabine, et bien d’autres. | Certains paramètres de programmation tels que l’étalonnage du capteur de vitesse du véhicule, la programmation de la taille des pneus et le rapport de pont arrière sont essentiels pour valider les données d’EDRVL. |
| Tendances en matière de diagnostic (groupe motopropulseur, émissions, cabine/commandes, systèmes de sécurité) | Paramètres de fonctionnement normaux pour différentes températures, pressions et vitesses mécaniques des composants du groupe motopropulseur. | Données d’instantané aléatoires des paramètres de fonctionnement normaux (en l’absence de défauts actifs) pour établir une base de référence d’un véhicule sain et l’utiliser pour l’entretien préventif et les réparations. |
| Données de trajet (groupe motopropulseur) | Vitesses moyennes du véhicule, régimes du moteur, charge du moteur, utilisation des vitesses, utilisation du régulateur de vitesse et données sur l’économie de carburant. | Peut inclure des données sur la vitesse et le régime du moteur maximums du véhicule. |
| Histogrammes (groupe motopropulseur) | Histogrammes de la consommation de carburant, histogrammes de la vitesse du véhicule par rapport au régime du moteur. | Utilisation moyenne du véhicule pour améliorer l’économie de carburant, réduire l’utilisation abusive de l’équipement. |
| Données spécifiques à un événement | ||
| Type de données (MCE) | Description | Remarques |
| Codes de diagnostic (groupe motopropulseur, émissions, cabine/commandes, systèmes de sécurité) | Données d’événements spécifiques concernant les défaillances des systèmes. | Peut également inclure des données d’instantanés étendus de codes de diagnostic. |
| Instantané étendu de code de diagnostic (groupe motopropulseur, émissions, cabine/commandes, systèmes de sécurité) | Un instantané de certains ou de tous les paramètres de fonctionnement au moment où un code de diagnostic est activé. | Il peut s’agir d’un instantané unique enregistré lorsqu’un code de diagnostic est activé, ou d’un instantané contenant de 2 à 60 secondes de données à diverses résolutions de communication, selon le FÉO. |
| Déclencheur de dernier arrêt (selon le FÉO) | En général, un enregistrement d’événement déclenché par l’arrêt du véhicule lourd. Peut nécessiter ou non le serrage du frein de stationnement ou la coupure du contact. | Déclencheur recommandé par la norme SAE J2728. |
| Déclencheur d’accélération (selon le FÉO) | En règle générale, un événement déclenché par un changement de la vitesse du véhicule, généralement de 7 à 10 mi/h/s, mesurée à l’arbre de queue de la transmission ou par un ou plusieurs capteurs de vitesse de roue montés sur une extrémité d’essieu dans l’ensemble moyeu. | Déclencheur recommandé par la norme SAE J2728. |
| Déclencheur externe (selon le FÉO) | En règle générale, il s’agit d’un enregistrement d’événement déclenché manuellement par le conducteur du véhicule au moyen d’un interrupteur monté sur le tableau de bord. | |
Les événements de données résumés dans le tableau 3 ci-dessus sont une description générale des enregistrements de données spécifiques ou non à un événement. Les conventions de dénomination de ces types généraux d’enregistrements varient d’un fabricant à l’autre.
7.0 Couverture de MCE de FÉO actuelle d’EDRVL
Les EDRVL, comme définis par la norme SAE J2728, constituent une fonction spécifique aux fins des enquêtes sur les accidents, de la reconstitution d’accidents et de la recherche en matière de sécurité routière. Il est important de noter qu’un EDRVL peut se trouver à bord d’un camion ou d’un autobus commercial nord-américain dans les MCE des FÉO du véhicule. L’EDRVL peut également se trouver dans un dispositif du marché secondaire installé à bord d’un camion ou d’un autobus commercial. Ces dispositifs du marché secondaire pourraient comprendre des dispositifs télématiques GPS ou d’anciens dispositifs d’enregistrement automatique embarqués, qui ont maintenant été remplacés par des dispositifs de consignation électronique. Les dispositifs d’enregistrement automatique embarqués et les dispositifs de consignation électronique ont pour principale fonction la consignation électronique des heures de service des conducteurs commerciaux. Il existe d’autres sources de données numériques, telles que les systèmes de caméras-témoins commerciaux (Lytx, Nauto, Netradyne, SmartDrive, SmartWitness, etc.).
Les camions et les autobus commerciauxFootnote 9 sont généralement propulsés par des moteurs diesel fabriqués par Caterpillar, Cummins, Detroit Diesel, Mack, Mercedes Benz, Navistar et Volvo. Ces moteurs ont été conçus et fabriqués en utilisant les MCE des FÉO pour en commander le fonctionnement. Ces lignes directrices sont axées sur les EDRVL présents dans les MCE des FÉO des camions ou des autobus commerciaux et nécessitent un ordinateur portable pourvu du logiciel de service approprié et d’une interface de communication de véhicule compatible RP1210 pour permettre la connexion, la communication et le téléchargement des données à partir des MCE des FÉO (figure 3).

Figure 3 : Ordinateur portable connecté au moyen du logiciel PowerSpec de Cummins par le réseau J1939/13
Les véhicules commerciaux fabriqués après 1998 peuvent être équipés d’un EDRVL dans le MCE du moteur. La figure 3 ci-dessus montre un ordinateur personnel portable exécutant le logiciel PowerSpec de Cummins et connecté à un porteur-remorqueur au moyen du connecteur de liaison de diagnostic Deutsch à neuf broches J1939/13 du véhicule. Entre 1998 et 2007, un camion ou un autobus commercial comportait généralement trois ou quatre MCE. Il s’agissait généralement du MCE du moteur, du MCE du véhicule ou de la cabine et du MCE du système de freinage antiblocage et du système antipatinage. Pour les camions et les autobus commerciaux propulsés par des moteurs diesel Caterpillar, Cummins, Detroit Diesel et Mercedes-Benz, l’EDRVL se trouvait dans le MCE du moteur. Cependant, l’EDRVL du logiciel DataMaxMD de Mack serait présente dans le MCE du véhicule pour les camions Mack propulsés par un moteur turbodiesel Mack au cours de cette même période.
Pour déterminer la disponibilité de l’EDRVL des FÉO dans un camion ou un autobus commercial, il ne suffit pas de prendre en compte l’année modèle, la marque et le modèle du véhicule. Pour les véhicules commerciaux, il est nécessaire de connaître l’année modèle, la marque, le modèle, ainsi que la marque et le modèle du moteur installé afin de déterminer l’EDRVL présent à bord du véhicule en question. Le tableau 4 ci-dessous résume les EDRVL disponibles en fonction du moteur installé dans le camion ou l’autobus commercial.
| Motoriste | Capacités d’enregistrement des données |
|---|---|
| Detroit Diesel |
Deux événements de freinage dur (1998 à ce jour) Un événement de dernier arrêt (1998 à ce jour) Trois enregistrements de diagnostic (1998 à 2007 et 2010 à ce jour) |
| Mercedes-Benz |
Deux événements de freinage dur (2000 à 2009) Un événement de dernier arrêt (2000 à 2009) Trois enregistrements de diagnostic (2000 à 2009) |
| Cummins |
Trois événements de décélération soudaine (2005 à ce jour) Instantanés de codes de défaillance (1998 à ce jour) |
| Caterpillar |
Événements d’arrêt rapide (2007 à 2010)* Instantanés de diagnostic (1995 à 2010) Déclencheurs externes (1995 à 2010) * Les arrêts rapides ne sont pas activés par défaut |
| Mack |
Un événement déclenché par une accélération (1998 à ce jour) Un événement de dernier arrêt (2007 à ce jour)** Fonction Fault Reporter (1998 à ce jour) ** Avant 2007, il était possible pour les camions Mack d’enregistrer deux événements déclenchés par l’accélération au lieu d’un seul. |
| Volvo |
Un événement déclenché par une accélération (2011 à ce jour) Un événement de dernier arrêt (2011 à ce jour) Plans figés (2002 à ce jour) |
| International/Navistar Maxxforce |
Deux événements de freinage dur (2010 à ce jour) Deux événements de dernier arrêt (2010 à ce jour) Plans figés (2010 à ce jour) |
| PACCAR |
Trois événements d’arrêt rapide (2008 à 2016) Plans figés (2008 à ce jour) Enregistreur d’arrêt rapide (2022 à ?) |
7.1 Ordinateurs de route des FÉO
Les véhicules commerciaux fabriqués à la fin des années 1990 et propulsés par des moteurs Detroit Diesel ou Cummins n’étaient pas dotés d’EDRVL intégrés dans les MCE de leurs moteurs. Toutefois, ces motoristes proposaient en option un ordinateur de route optionnel monté sur le tableau de bord, qui fournissait aux conducteurs des données relatives au trajet comme le temps de trajet, la distance parcourue, la consommation de carburant et les données relatives à l’économie de carburant. Ces ordinateurs de route montés sur le tableau de bord comprenaient également un EDRVL.
Lors d’une enquête sur un accident mettant en cause un camion plus ancien propulsé par un moteur Detroit Diesel ou Cummins, l’enquêteur doit examiner le tableau de bord et la console au-dessus du pare-brise pour vérifier la présence d’ordinateurs de route.
Les figures 4 à 6 ci-dessous présentent des exemples d’un ordinateur de route RoadRelay de Cummins dans un camion Peterbilt 2012.

Figure 4 : Ordinateur de route RoadRelay5 de Cummins

Figure 5 : Ordinateur de route RoadRelay3 de Cummins

Figure 6 : Compteur d’arrêt d’urgence de l’ordinateur de route RoadRelay3 de Cummins
L'image montre l'ordinateur de bord Cummins RoadRelay installé dans le panneau d'instruments d'un camion Peterbilt de 2012. L'affichage du dispositif RoadRelay indique un événement de freinage d'urgence enregistré.
Selon la génération de l’ordinateur de route RoadRelay de Cummins, celui-ci peut stocker d’un à trois événements d’arrêt d’urgence ainsi que d’autres données, comme le montre la figure 7 ci-dessous.
Figure 7: Résumé des ordinateurs de route RoadRelay de CumminsFootnote 10
L'image montre les versions trois, quatre et cinq de l'ordinateur de bord Cummins RoadRelay. Le RoadRelay3 peut enregistrer un événement de freinage d'urgence, tandis que les RoadRelay4 et RoadRelay5 peuvent enregistrer trois événements de freinage d'urgence. Pour la corrélation des événements, le RoadRelay3 utilise le kilométrage du voyage et les heures de voyage, tandis que les RoadRelay4 et RoadRelay5 utilisent une horloge interne en temps réel. Tous les ordinateurs de bord RoadRelay enregistrent des rapports de voyage et des codes de défaut. Le RoadRelay3 nécessite le logiciel InRoads, le RoadRelay4 nécessite les logiciels Inform/Inspec ou PowerSpec, et le RoadRelay5 nécessite le logiciel PowerSpec. Le RoadRelay3 nécessite un câble matériel RS-232, le RoadRelay4 nécessite un connecteur de diagnostic à bord ou un câble d'extraction direct vers le module via le harnais RoadRelay numéro de pièce 4003775, et le RoadRelay5 nécessite un connecteur de diagnostic à bord. Le RoadRelay3 utilise une mémoire à état solide pour le stockage des données, tandis que les RoadRelay4 et RoadRelay5 utilisent une mémoire vive pour le stockage des données.
Les ordinateurs de route RoadRelay3 peuvent stocker un événement d’arrêt d’urgence, y compris 45 secondes de données avant et 15 secondes de données après le déclenchement communiquées à 1 Hz (un échantillon de données par seconde). Le seuil de déclenchement est programmable, mais il est fixé par défaut à 14,5 km/h/s (9 mi/h/s).
Les ordinateurs de route RoadRelay4 et 5 peuvent stocker les trois derniers événements d’arrêt d’urgence, y compris 59 secondes données avant et 15 secondes de données après le déclenchement communiquées à 1 Hz (un échantillon de données par seconde). Le seuil de déclenchement est programmable, mais il est fixé par défaut à 14,5 km/h/s (9 mi/h/s).
L’EDRVL de Cummins est présente dans la plupart des MCE des moteurs Cummins, à partir des moteurs de l’année modèle 2007. Toutefois, il est possible que des camions plus récents soient encore équipés d’un ordinateur de route RoadRelay4 ou RoadRelay5 de Cummins. Dans ce cas, le MCE du moteur Cummins et l’ordinateur de route RoadRelay disposeront d’un EDRVL.
Pour les véhicules plus anciens équipés d’un moteur Detroit Diesel, il faut examiner le tableau de bord et la console au-dessus du pare-brise pour vérifier la présence d’un ordinateur de route ProDriverMD, comme le montrent les figures 8 et 9 ci-dessous.

Figure 8 : Ordinateur de route ProDriver Detroit Diesel (Freightliner)
L'image montre l'ordinateur de bord Detroit Diesel Freightliner ProDriver. L'ordinateur de bord ProDriver a ajouté des fonctionnalités d'EDRVL (enregistreurs de données routières des véhicules lourds) au véhicule. L'écran de l'image indique une version de test du système, version trois.

Figure 9 : Ordinateur de route ProDriver de moteur Detroit Diesel (Freightliner)
Le moteur DDEC (Detroit Diesel Engine Controls) de troisième génération de Detroit Diesel était dépourvu d’un EDRVL. Cependant, l’ajout de l’ordinateur de route Detroit Diesel ProDriver en option a ajouté un EDRVL au véhicule dans lequel il était installé. Les commandes de la série DDEC III ont été utilisées sur les moteurs de série des années modèles 1994 à 1997.
La génération de commandes électroniques DDEC IV a été utilisée dans les moteurs de série de 1998 à 2003 et comprenait un EDRVL. Cette dernière a été conservée dans toutes les générations suivantes de commandes DDEC jusqu’à ce jour. Après 1998, l’ordinateur de route Detroit Diesel ProDriver n’était plus nécessaire pour munir un véhicule d’un EDRVL. Toutefois, il convient de noter qu’il est possible que les camions propulsés par un moteur Detroit Diesel plus récent équipé de commandes DDEC IV ou plus récentes soient encore dotés d’un ordinateur de route ProDriver. Dans ces rares cas, les données de type EDRVL seraient disponibles à la fois dans le MCE du moteur Detroit Diesel DDEC et dans l’ordinateur de route ProDriver.
Il existe d’autres ordinateurs de route plus anciens comme l’ordinateur de route DataStarMD de Western Star (figure 10) ou l’ordinateur de route Messenger System de Caterpillar (figure 11).

Figure 10 : Système DataStar de Western Star
L'image montre l'ordinateur de bord Western Star DataStar. Le dispositif DataStar sert uniquement comme ordinateur de bord, suivant la distance parcourue, le temps, la consommation de carburant et l'économie de carburant. Il ne possède pas de fonctionnalités d'enregistreur de données routières pour véhicules lourds.

Figure 11 : Système Messenger de Caterpillar
L'image montre l'ordinateur de bord Caterpillar Messenger System. Le dispositif Caterpillar Messenger sert uniquement comme ordinateur de bord, suivant la distance parcourue, le temps, la consommation de carburant et l'économie de carburant. Il ne possède pas de fonctionnalités d'enregistreur de données routières pour véhicules lourds.
Les dispositifs CAT Messenger de Caterpillar et DataStar de WesternStar servent uniquement d’ordinateurs de route, assurant le suivi de la distance parcourue, des heures, de la consommation de carburant et de l’économie de carburant. Ils sont dépourvus d’un EDRVL.
À partir de l’année modèle 2006 (approximativement), des moteurs et des dispositifs antipollution plus avancés ont été introduits pour répondre aux exigences plus strictes en matière d’émissions des moteurs diesel définies par l’Environmental Protection Agency (EPA) des États-Unis en 2007 [EPA2007]. Au fur et à mesure que les moteurs et des dispositifs antipollution se perfectionnaient, les tableaux de bord des FÉO en faisaient autant, ce qui a entraîné l’abandon des ordinateurs de route optionnels tels que le RoadRelay de Cummins ou le ProDriver de Detroit Diesel. Ces nouvelles exigences en matière d’émissions ont généralement été satisfaites par l’introduction de dispositifs antipollution, comme le filtre à particules diesel, qui nécessitait beaucoup plus de capteurs et de puissance de traitement. Pour répondre à la demande d’augmentation de la puissance de traitement des ordinateurs, les moteurs et les dispositifs antipollution sont passés d’un seul MCE à des configurations comportant plusieurs MCE. Les véhicules plus récents possèdent toujours un EDRVL. Cependant, lorsqu’un camion très endommagé doit faire l’objet d’une imagerie (téléchargement), le protocole d’imagerie (téléchargement) des données se complique.
7.2 Autres enregistreurs de données des FÉO
Depuis l’année modèle 2016 (approximativement), les camions et les autobus commerciaux équipés de freins antiblocage, d’un système antipatinage et d’un système de contrôle électronique de stabilité Bendix peuvent également disposer d’un EDRVL distinct et indépendant, connu sous le nom d’enregistreur de données Bendix. Ce dernier joue le rôle d’un EDRVL supplémentaire parallèlement à l’EDRVL que l’on retrouve dans le MCE du moteur ou celui du véhicule pour les véhicules mentionnés précédemment.
En outre, depuis l’année modèle 2016 (approximativement), les camions et les autobus commerciaux peuvent être équipés de systèmes d’atténuation des collisions à base de radar et de caméra qui comprennent le régulateur de vitesse adaptatif, le freinage d’urgence automatique à l’avant et l’avertisseur de sortie involontaire de voie. Ces systèmes peuvent également être en mesure d’enregistrer des données.
En outre, de nombreux camions sont équipés de boîtes de vitesses manuelles automatisées, qui utilisent des commandes électroniques pour actionner l’embrayage et les vitesses. Ces boîtes de vitesses sont équipées de contrôleurs électroniques qui peuvent également être en mesure d’enregistrer des données dans le cadre de leur fonctionnalité.
8.0 Accès aux EDRVL
De nombreux outils logiciels et matériels de diagnostic des FÉO coûteux sont nécessaires pour imager les données des différentes marques de camions ou d’autobus de gros tonnage. Contrairement à l’EDR des véhicules de tourisme, il n’existe pas d’outil universel permettant d’accéder à la grande majorité des véhicules commerciaux de poids moyen ou de gros tonnage en Amérique du Nord.
En ce qui a trait à l’accès aux données, le comité des normes d’EDR des véhicules légers SAE J1698 et le comité des EDRVL SAE J2728 recommandent d’utiliser le terme « imagerie » au lieu de « téléchargement » pour décrire le processus de copie des données à partir des puces de mémoire physique d’un MCE. Cette terminologie met l’accent sur un protocole scientifiquement neutre qui garantit que les données sont copiées sans modifier, supprimer ou effacer physiquement ces puces de mémoire.
Certains processus de « téléchargement » de données sont plus invasifs et peuvent ne pas préserver les données originales telles qu’elles résident sur les puces de mémoire physique. Certaines situations peuvent nécessiter le recours à ces techniques plus invasives en raison des dommages importants subis par le camion ou l’autobus lourd ou ses MCE.
Dans de nombreux cas, les véhicules modernes peuvent comporter plusieurs EDRVL pouvant saisir des données, chacun nécessitant un logiciel de diagnostic spécifique pour y accéder. Par exemple, un Peterbilt 589 de 2021 peut être équipé d’un moteur turbodiesel PACCAR MX13, d’une boîte de vitesses manuelle automatisée Eaton RoadRanger et d’un système de freins antiblocage Bendix, avec l’option Wingman Fusion de Bendix. Tous ces systèmes ont la capacité d’enregistrer des événements d’EDRVL ou des enregistrements instantanés détaillés liés aux codes de diagnostic et nécessiteraient les logiciels PACCAR Davie4, Eaton ServiceRanger et Bendix Acom Pro afin d’imager toutes les données disponibles, d’y accéder et de les préserver. Si l’enquêteur n’utilise pas tous ces outils logiciels, il risque de passer à côté d’un ou de plusieurs éléments de preuve électronique essentiels.
Le port de diagnostic le plus courant sur les modèles récents de véhicules de poids moyen et de gros tonnage est le port de diagnostic (Deutsch) SAE J1939-13 à neuf broches. Il existe un ancien connecteur de type I J1939 qui est noir, comme le montre la figure 12 ci-dessous.
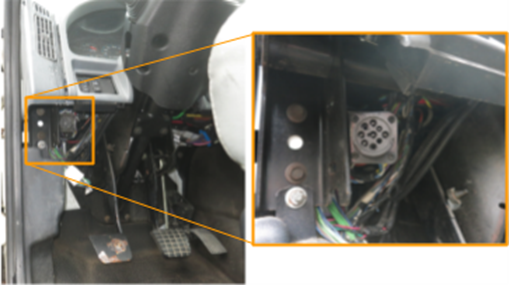
Figure 12 : Connecteur Deutsch SAE J1939-13 de type I à neuf broches (noir)
Le connecteur J1939 de type II, plus récent et plus rapide, est vert, comme le montre la figure 13 ci-dessous.

Figure 13 : Connecteur Deutsch SAE J1939-13 de type II à neuf broches (vert)
Les véhicules lourds Mack et Volvo construits à partir de 2014 peuvent être équipés d’un port de diagnostic de type OBD-II pour véhicules légers.
Une interface de communication de véhicule est nécessaire pour connecter physiquement un ordinateur portable à un camion lourd ou un autobus afin d’obtenir des images de ce véhicule à l’aide du logiciel approprié. Ces interfaces sont nécessaires non seulement pour accéder aux données des EDRVL, mais aussi pour entretenir, réparer et configurer correctement ces véhicules lourds. Ils sont conçus pour répondre à la pratique recommandée TMC RP1210Footnote 11.
Les trois principales interfaces de communication RP1210 pour véhicules de poids moyen et de gros tonnage sont le dispositif NEXIQ USB-Link2, le dispositif Noregon DLA 2.0 et le dispositif Dearborn Group DPA5 Pro.
Certains camions de poids moyen et systèmes connexes nécessitent l’utilisation d’une interface de communication de véhicule de FÉO spécifique pour permettre la connexion à certains véhicules de poids moyen et la communication avec ceux-ci.
Lorsqu’un organisme ou une organisation ne dispose pas du logiciel nécessaire, d’un appareil conforme à la norme RP1210 ou de la formation et de l’expérience requises pour réaliser une imagerie de données sur un véhicule commercial, il peut demander l’aide d’un atelier de réparation de véhicules diesel lourds ou d’un concessionnaire agréé de camions ou d’autobus. Ces ateliers de réparation indépendants et ces concessionnaires ont généralement accès aux logiciels d’entretien et de diagnostic des FÉO, ainsi qu’au matériel nécessaire. Ils possèdent des connaissances et une expérience approfondies liées au travail avec la configuration électronique d’un camion et les données de diagnostic, y compris les codes de diagnostic, dans le but d’étalonner, de configurer, de réparer et d’entretenir ces véhicules. Cependant, ils ne disposeront pas de l’expertise nécessaire pour comprendre et traiter les données des EDRVL en tant qu’éléments de preuve de manière scientifiquement neutre.
Les EDRVL possèdent des caractéristiques uniques qui doivent être prises en compte avant d’accéder aux données stockées. Par exemple, de nombreux concessionnaires Freightliner utilisent le logiciel Detroit Diesel Diagnostics pour imager et sauvegarder les données des EDRVL des DDEC. Ce logiciel est configuré par défaut pour effacer et réinitialiser les données relatives aux événements et aux trajets, ce qui peut entraîner une spoliation importante des éléments de preuve et soulever des inquiétudes quant à la chaîne de possession.
Compte tenu de ces facteurs, les données des EDRVL ne doivent être traitées que par du personnel expérimenté et qualifié. Le recours à un atelier de réparation ou à un concessionnaire agréé de camions ou d’autobus ne doit être envisagé qu’en « dernier recours », et il convient de s’assurer que le personnel et les procédures en place sont en mesure de préserver l’intégrité des données, de maintenir la chaîne de possession et de respecter les exigences prévues par la loi.
8.1 Services d’imagerie d’EDRVL spécialisés
Actuellement, un nombre limité d’EDRVL nécessitent l’assistance du constructeur spécifique de l’EDRVL pour accéder aux données, les interpréter et les communiquer. Ces constructeurs comprennent Daimler Trucks, Mack Trucks, Volvo Bus, Prevost, Volvo Trucks et Bendix Commercial Vehicle Safety Systems.
Les camions équipés du système d’atténuation des collisions Detroit Assurance peuvent avoir des données limitées sur les événements enregistrés par le système. Ces données sont accessibles au personnel qualifié équipé du logiciel Detroit Diesel Diagnostic Link qui a suivi les protocoles décrits recommandés par Daimler Trucks North America et qui a reçu l’autorisation claire et écrite du propriétaire du camion en question. Il est également possible de retirer du camion le matériel contenant les données et de l’envoyer à deux prestataires de services agréés spécialisés dans l’imagerie des données de ces systèmes. Pour plus d’informations, visitez le site Web du HVEDR DTNA.
Pour accéder aux données de l’EDRVL d’un camion Mack, Volvo, d’un autobus Volvo ou d’un autobus Prévost équipé d’un moteur Mack ou Volvo, il convient de communiquer avec un fournisseur de services agréé Mack/Volvo. De plus amples informations sont disponibles sur les site Web de MACK TRUCKS + VOLVO website:
Pour accéder aux données de certains MCE de freins antiblocage EC-60 ou EC-80 Bendix ou d’autres systèmes Bendix, les données ou le matériel doivent être envoyés à Bendix à des fins d’imagerie, de traduction et de communication des données. Les données hexadécimales brutes peuvent être visualisées à partir de l’EC-60 ou de l’EC-80 Bendix à l’aide du logiciel de diagnostic Acom Pro Bendix. Le fichier de diagnostic résultant doit être sauvegardé en tant que fichier Web « .htm » ou « .logx » (fichier journal de service propriétaire de Bendix) et envoyé à Bendix soit par courriel, soit sur une clé USB aux fins de services de traduction et de communication des données. Il faut consulter la dernière version du formulaire de demande et de diffusion de téléchargement des données AutoVue Bendix pour obtenir des directives et des conseils.
Au Canada, il existe également des dispositions qui obligent les constructeurs à aider le gouvernement à récupérer et à analyser les données créées ou enregistrées par un véhicule. Tous les nouveaux véhicules automobiles construits ou importés pour être vendus au Canada doivent notamment être conformes au règlement adopté en vertu de la Loi sur la sécurité automobile. L’article 8 de cette Loi fait référence aux « moyens d’analyse » :
« L’entreprise qui appose une marque nationale de sécurité sur des matériels, qui vend des matériels sur lesquels est apposée une telle marque ou qui importe des matériels d’une catégorie assujettie à des normes réglementaires fournit au ministre, à sa demande, les moyens lui permettant d’extraire ou d’analyser les renseignements créés ou recueillis par les matériels. »
Cette disposition est d’une grande importance, car elle permet au gouvernement de surveiller et d’appliquer efficacement les normes de sécurité pour les véhicules et les équipements. En permettant au gouvernement de récupérer et d’analyser les données enregistrées par le véhicule, il obtient les outils nécessaires pour cerner et traiter les enjeux ou les tendances potentielles en matière de sécurité.
8.2 Outil commun nécessaire
La normalisation de l’EDRVL pour l’ensemble des FÉO nécessite un outil commun afin que les organismes gouvernementaux, les chercheurs, les gestionnaires de parcs de véhicules, les forces de l’ordre et les consultants indépendants n’aient pas à acheter plusieurs outils ni suivre une formation à cet égard, aux fins de l’imagerie des données provenant des camions et des autobus commerciaux.
Un organisme ou une organisation peut devoir effectuer un investissement initial d’environ 9 000 $ US et en frais de licence annuels récurrents pour tous les différents logiciels de diagnostic de camions disponibles. En outre, il peut être tenu de verser une somme supplémentaire de 1 000 $ pour se procurer l’une des interfaces de véhicule conformes à la norme TMC RP1210 qui peuvent être physiquement connectées aux camions. En établissant un outil commun qui peut se connecter à tous les types de camions et d’autobus commerciaux, le coût de l’investissement dans du matériel et des logiciels aux fins de l’imagerie des données d’EDRVL peut être considérablement réduit.
En outre, la normalisation d’un outil d’imagerie de données commun pour EDRVL simplifierait grandement les efforts de formation. À l’heure actuelle, le temps formation qu’exigent les applications logicielles de diagnostic des différents fabricants, notamment Allison, Bendix, Caterpillar, Cummins, Detroit Diesel/Mercedes-Benz, Eaton, International/Navistar, PACCAR, Volvo/Mack et WABCO, est considérable.
L’outil d’imagerie d’EDR couramment utilisé pour les véhicules de tourisme légers pourvus d’un EDR conforme à la partie 563 est l’outil Crash Data Retrieval (CDR) conçu, fabriqué et vendu par Bosch Automotive Service Solutions, Inc. située à Santa Barbara, Californie, États-Unis. L’outil CDR de Bosch peut accéder aux données d’environ 90 % des véhicules équipés d’un EDR sur le marché nord-américain des véhicules légers. Pour garantir son efficacité et sa compatibilité, l’outil CDR est régulièrement mis à jour par le fabricant et intègre des commentaires des formateurs pour l’outil lors du sommet annuel des FÉO de BOSCH.
À l’heure actuelle, aucun outil universel unique n’est compatible avec la plupart des constructeurs de camions et d’autobus commerciaux du marché nord-américain. Cependant, Synercon Technologies offre une solution appelée Forensic Link Adapter (FLA). Le FLA est un ordinateur robuste conçu pour télécharger les données des EDRVL de divers constructeurs, y compris les MCE de Detroit Diesel, Mercedes, PACCAR MX, Navistar MaxxForce et Caterpillar plus anciens. En outre, le FLA sert d’interface conforme à la norme RP1210 pour communiquer avec les logiciels des FÉO. Communiquant par les réseaux J1939 et J1708, l’algorithme de détection de Synercon Technologies balaye les réseaux du véhicule à la recherche de données spécifiques au moteur, telles que les instantanés CAT ou les enregistrements d’événements de freinage durs DDEC. Le FLA image ensuite les données de manière sécurisée en les chiffrant pour en garantir l’authenticité et l’intégrité. Avec 16 Go de mémoire, le FLA peut stocker des données indéfiniment jusqu’à ce qu’elles soient téléchargées, décodées et affichées sur le serveur de Synercon Technologies. Pour de plus amples renseignements sur le FLA et ses capacités, veuillez consulter le site Web de Synercon Technologies.
Le dispositif peut prétendre à l’universalité en ce qui concerne sa compatibilité avec plusieurs MCE des FÉO. Il est toutefois important de noter que sa conception n’a pas fait appel à des contributions directes ou exclusives de la part des FÉO. Bien que le dispositif puisse fonctionner avec différents MCE, l’absence de contribution de la part des fabricants peut entraîner des limitations ou des variations de compatibilité et de rendement entre les différents FÉO. Il est recommandé de consulter le fabricant du dispositif ou de vérifier sa compatibilité avec des FÉO spécifiques avant de s’en servir pour obtenir des données d’imagerie provenant de camions et d’autobus commerciaux.
8.3 Analyse et limites des données des EDRVL
Lors de l’examen des données « numériques » d’un EDRVL, il est essentiel d’en valider l’exactitude et la pertinence par rapport au véhicule et à l’incident spécifique faisant l’objet de l’enquête. Bien que le présent document ne couvre pas tous les scénarios possibles ni tous les documents de recherche sur la validité des données, il souligne l’importance d’inspecter minutieusement les composants du véhicule, de demeurer à jour quant à la formation relative aux EDRVL et d’effectuer les essais pratiques pertinents et nécessaires.
Certains des points de validation qui doivent être analysés sont énumérés ci-dessous. Le fait de ne pas documenter ni d’examiner ces zones pourrait entraîner une application inexacte des données.
- Identification du châssis (numéro d’identification de véhicule, date de fabrication)
- Identification du moteur (numéro de série du moteur, numéro de modèle du moteur, date de construction du moteur)
- Identification de la boîte de vitesses et du pont moteur (numéros de série, rapports)
- Pneus d’entraînement (modèle, taille, plage de charge, état)
- Identification du MCE (numéro de série du MCE, numéro de modèle du MCE, version logicielle)
- Capteurs (capteur de vitesse du véhicule, capteurs de vitesse de roue)
L’analyse des données d’un EDRVL doit généralement permettre de répondre à trois questions fondamentales, soit :
- établir que les données de l’EDRVL proviennent du véhicule en question;
- établir que les données de l’EDRVL proviennent de l’accident ou de l’incident en question;
- établir l’exactitude des données.
Lorsqu’on analyse les données historiques vitesse-temps du véhicule communiquées par l’EDRVL, la source d’erreur la plus importante concernant la vitesse du véhicule communiquée est le patinage des roues attribuable à l’intervention des freins antiblocage pendant le freinage, qui entraîne un blocage partiel des roues, ce qui peut conduire à une sous-estimation de la vitesse du véhicule de l’ordre de 7 à 31,5 %Footnote 12. La deuxième source d’erreur la plus fréquente dans les données relatives à l’historique de la vitesse du véhicule est l’étalonnage du capteur de vitesse du véhicule. En règle générale, cela peut entraîner une erreur de moins de +/- 2 % dans la vitesse communiquéeFootnote 13. Toutefois, des erreurs plus importantes ont été observées, en particulier avec des camions achetés d’occasion ou de troisième main, et dont la configuration avait été modifiée par rapport à celle d’un porteur-remorqueur de classe 8 construit à l’origine aux fins d’une exploitation de grande distance et converti en un camion-benne à trois essieux. Une boîte de vitesses manuelle d’un modèle différent présentant un rapport de démultiplication différent peut être remplacée. Le rapport de pont arrière peut également être remplacé par un rapport beaucoup plus court. Si le MCE du moteur n’est pas reprogrammé pour refléter ces changements, l’indicateur de vitesse du véhicule et toutes les données relatives à l’historique de la vitesse de ce dernier peuvent présenter des erreurs importantes. Il est possible d’obtenir du fabricant du châssis les dossiers de fabrication indiquant le numéro de série du moteur et les autres composants principaux, ainsi que leur numéro de série, qui étaient installés à l’origine sur ce châssis lors de la construction du véhicule.
Il est important de faire preuve de prudence lorsqu’il s’agit de véhicules plus anciens, car il se peut que le moteur ou les MCE d’origine aient été remplacés. Cela peut entraîner des divergences entre les plaques signalétiques des moteurs et la configuration de ces derniers.
Dans le cas d’un moteur Detroit Diesel Series 60 plus ancien, son couvre-culasse est pourvu de plaques d’identification importantes contenant des renseignements sur la certification par l’EPA, l’identification de la famille de moteurs de l’EPA, la date de fabrication, le modèle de moteur, la puissance du moteur et le numéro de série du moteur. Il est important de noter que ces couvre-culasses, fabriqués en composite renforcé de fibres, peuvent se fissurer et se briser au fil du temps. Si on achète un couvre-culasse d’occasion pour remplacer un couvre-culasse brisé, il est possible qu’il comporte toujours les plaques signalétiques du moteur d’origine, qui n’ont peut-être pas été mises à jour pour refléter la configuration actuelle du moteur.
Les MCE de moteur qui ne sont plus utilisables en raison de défaillances internes de la carte de circuit imprimé peuvent être remplacés par des MCE d’occasion. Toutefois, il est important de noter que le remplacement des MCE défectueux par des MCE d’occasion peut nécessiter une reprogrammation afin de garantir un fonctionnement approprié. Cette reprogrammation consiste généralement à adapter la puissance utile et à saisir des valeurs d’étalonnage pour les injecteurs de carburant diesel, entre autres ajustements. Il est possible que d’autres renseignements, y compris l’identification du châssis (numéro d’identification de véhicule, numéro de châssis, numéro d’unité), ne soient pas mis à jour au cours de ce processus. Si l’étalonnage du CVV n’est pas mis à jour, l’indicateur de vitesse du véhicule sera erroné et toutes les données enregistrées par l’EDRVL pourraient l’être également.
La documentation des composants du groupe motopropulseur du camion ou de l’autobus, tels que l’identification du moteur, l’identification de la boîte de vitesses, l’identification du pont moteur et l’identification des pneus d’entraînement, y compris la marque, le modèle, la plage de charge, la taille et l’état, est en effet cruciale pour valider et quantifier l’exactitude de l’historique vitesse-temps du véhicule enregistré.
Il est important de procéder à l’imagerie des données (téléchargement) de toutes les données disponibles, y compris les odomètres et les compteurs horaires, pour horodater les données des EDRVL.
Pour les camions équipés d’horloges en temps réel, il est important de synchroniser l’horloge de l’ordinateur portable utilisé afin d’imager les données du véhicule avec une heure et une date précises. Pour garantir la précision de l’imagerie des données des EDRVL, il est recommandé de régler l’horloge de l’ordinateur portable sur le temps universel coordonné afin d’éviter toute complication ou confusion supplémentaire dans la correction de l’heure en tenant compte des différents fuseaux horaires et de l’heure avancée. Certains véhicules peuvent avoir une fonctionnalité d’horloge limitée ou une horloge interne en temps réel est tellement décalée qu’elle peut être inutilisable.
Il peut y avoir des enjeux spécifiques de communication de données pour certains FÉO de camions et certaines années modèles qui doivent être pris en compte lors de l’analyse des données des EDRVL. Par exemple, l’état activé du régulateur de vitesse dans les rapports des EDRVL n’indique pas toujours que le système de régulation de vitesse commande activement la vitesse du véhicule. Cela peut plutôt signifier que l’interrupteur principal du régulateur de vitesse est activé et que le système est prêt et activé. Une vitesse constante du véhicule avec une position de pédale d’accélérateur à 0 % et une variation de la charge calculée du moteur supérieure à zéro indiqueraient que le régulateur de vitesse est activé et qu’il maintient activement la vitesse programmée du véhicule.
Les données des EDR des véhicules de tourisme sont une source précieuse de renseignements qui peuvent fournir des détails précis et fiables sur le moment, la séquence des événements et les mesures prises avant un accident, ainsi que sur le rendement des systèmes de protection des occupants pendant l’accident. L’analyse des données des EDR des véhicules de tourisme permet une corrélation facile avec la scène de l’accident, y compris le point d’impact réel. Les données des EDR des véhicules de tourisme sont déclenchées par le déploiement des dispositifs de protection des occupants, tels que les prétensionneurs de ceintures de sécurité et les sacs gonflables. Étant donné que ces dispositifs de protection des occupants sont déployés durant les premières phases d’une impulsion de choc en cours de développement, le déclencheur est généralement l’événement de l’accident.
Toutefois, cela peut ne pas être le cas pour les données des EDRVL d’une collision entre un camion ou un autobus commercial lourd et une voiture de tourisme en raison de la disparité de poids entre les deux véhicules, comme le montre la figure 4 ci-dessous. Comme indiqué précédemment dans le présent document, les déclenchements d’événements sur un EDRVL sont basés sur un changement de vitesse mesuré par le capteur de vitesse du véhicule plutôt que sur une impulsion de choc détectée par un accéléromètre.
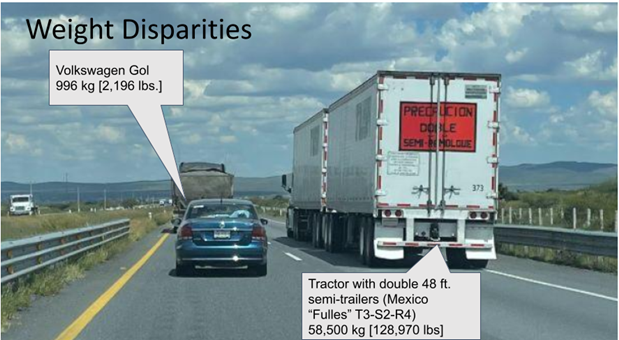
Figure 14 : Disparités de poids entre un véhicule léger et un ensemble routier lourd
L'image montre l'écart de poids entre les deux véhicules circulant sur une route rurale à deux voies et pavée d'asphalte. À gauche de l'image se trouve un véhicule de tourisme pesant 996 kg. À droite de l'image se trouve un ensemble tracteur-remorque pesant 58 500 kg.
Le déclencheur d’un enregistrement de freinage dur enregistré lors d’une collision entre un gros ensemble routier et une voiture de tourisme ne correspond pas nécessairement à l’événement réel de l’accident ou à l’impulsion de choc elle-même. L’enregistrement de freinage dur pourrait être déclenché avant l’impact, pendant la collision ou même après celle-ci. Par exemple, l’enregistrement de freinage dur pourrait être déclenché avant l’impact si le conducteur du camion ou un système d’aide à la conduite freine avant la collision pour tenter de l’éviter. L’événement pourrait également être déclenché au début de la collision elle-même. Il est aussi possible que l’événement soit déclenché après la collision, soit parce que le conducteur du camion a freiné après la collision, soit en raison d’un dommage mécanique qui entraîne le blocage des roues motrices et déclenche l’événement sans aucune action de freinage de la part du camionneur.
Pour cet exemple, ainsi que pour de nombreux autres scénarios, il est essentiel que l’enquêteur chargé d’imager (télécharger) les données de l’EDRVL d’un véhicule commercial procède également à une enquête et une analyse classiques de reconstitution d’accident.
La réalisation d’une reconstitution classique permet à l’enquêteur de comprendre la séquence des événements, de comparer les méthodes classiques de reconstitution d’accidents aux données de l’EDRVL enregistrées et de valider ces dernières. Cette approche est souvent appelée une reconstitution adaptée à la situation.
Il existe un risque important d’interprétation erronée des données si l’on se fie uniquement aux données de l’EDRVL d’un camion ou d’un autobus lourd pour analyser un accident. Comme indiqué dans le présent document, les données des EDRVL (ou EDR) présentent des limites et des incertitudes qui les rendent insuffisantes pour être utilisées de manière indépendante, sans tenir compte des éléments de preuve physiques et des méthodes classiques de reconstitution d’accidents qui ont été utilisées et affinées au cours des 75 dernières années.
Pour bien comprendre les limites des données et l’analyse adéquate des données d’un EDR et d’un EDRVL, il est essentiel d’assurer une formation technique continue sur cette technologie.
9.0 Survivabilité d’un EDRVL
L’équipe de recherche qui travaille sur ce document compte plus de 125 ans d’expérience combinée dans l’accès, la préservation et l’analyse des données des EDRVL. La vaste expertise de ces membres a permis de cerner deux situations principales dans lesquelles il est impossible d’imager des données provenant d’un EDRVL d’un camion ou d’un autobus lourd en cause dans un accident routier. Ces situations sont :
- les incendies après collision : lors d’un incendie après collision, la chaleur intense et les dommages qui en résultent peuvent rendre l’EDRVL et ses données inaccessibles à des fins d’imagerie;
- la perte d’énergie électrique : une perte d’énergie électrique peut être attribuable à des dommages importants subis par le camion ou l’autobus lourd, entraînant la destruction des batteries principales du véhicule ou une grave perturbation du système électrique. Dans certains cas, les câbles des batteries principales peuvent être pincés, mis à la terre ou coupés, ce qui entraîne une perte d’énergie électrique totale.
Pour les porteurs-remorqueurs, la fonctionnalité et les données d’EDRVL sont généralement situées dans les MCE de moteur qui sont habituellement montés directement sur le bloc-moteur ou dans le tableau de bord de la cabine du camion. De même, pour les autobus, l’EDRVL et ses données se trouvent généralement dans le MCE de moteur monté directement sur le bloc-moteur. Dans certains cas, ils peuvent également se trouver dans des panneaux électriques situés à différents endroits de l’autobus, par exemple dans les compartiments à bagages justes à l’avant du pont moteur, juste à l’arrière de l’essieu directeur, à l’avant gauche de l’autobus juste à l’extérieur de l’habitacle du conducteur, ou quelque part à l’intérieur de l’autobus, autour de l’habitacle du conducteur.
Certains EDRVL sont conçus pour être plus robustes et moins susceptibles de perdre des données en cas de perte d’énergie électrique. Ces enregistreurs peuvent stocker 20, 30 ou 90 secondes de données avant le déclenchement et écrire les données de déclenchement et les données après le déclenchement dans la mémoire avant qu’ils ne cessent de fonctionner en cas de perte d’énergie électrique.
Cependant, il est important de noter que les EDRVL ne stockent pas tous des données en cas de perte de l’énergie électrique. Certains EDRVL requièrent des conditions spécifiques, telles qu’un serrage du frein de stationnement ou un signal de coupure de contact, pour amorcer le stockage des données dans la mémoire.
Dans les situations où un incendie survient après une collision, les camions et les autobus lourds équipés d’un MCE contenant l’EDRVL et le module de données d’EDRVL physique installé sur le côté du moteur ou dans le tableau de bord de la cabine du véhicule sont également touchés, comme le montrent les figures 15, 16 et 17.

Figure 15 : Camion semi-remorque consumé par un incendie après une collision

Figure 16 : MCE de moteur d’un camion semi-remorque consumé par un incendie après une collision

Figure 17 : MCE fondu sur la timonerie de direction
La création et la conception de solutions pour éviter la perte de données due aux incendies après une collision ou à la perte d’énergie électrique sont en effet des sujets qui devraient être abordés par les FÉO de camions et les fournisseurs de rang 1, éventuellement dans des forums tels que le comité SAE J2728.
Une solution simple pour limiter la perte de données dans les incendies après une collision pourrait consister à déterminer un emplacement physique optimal pour le MCE à bord du camion ou de l’autobus qui minimise le risque de dommages dans de tels incidents. En outre, une solution plus complexe consisterait à envisager la pose du MCE sur le châssis ou la cabine, ainsi que la mise en œuvre d’une coque extérieure plus robuste et plus résistante à la chaleur pour protéger contre les dommages thermiques.
Pour résoudre l’enjeu de la perte d’énergie électrique, une solution simple pourrait consister à supprimer l’exigence de conditions spécifiques, telles que le serrage du frein de stationnement ou un signal de coupure de contact, pour écrire des données dans la mémoire. En éliminant ces exigences, il serait possible de conserver au moins un enregistrement d’EDRVL partiel (soit un enregistrement de dernier arrêt, soit un enregistrement déclenché par l’accélération) jusqu’au moment de la perte d’énergie électrique.
Une solution plus complexe pour atténuer la perte de données attribuable à une perte d’énergie électrique consisterait à incorporer un système d’alimentation de secours. Ce système de secours pourrait alimenter l’EDRVL, lui permettant de continuer à écrire des données même en cas de perte d’énergie électrique totale. Toutefois, il est recommandé que, même avec une alimentation électrique de secours, l’exigence d’un serrage du frein de stationnement ou d’un signal de coupure de contact pour écrire des données dans la mémoire de l’EDRVL soit supprimée pour tenir compte des situations où le conducteur du camion ou de l’autobus lourd n’est pas mesure de serrer le frein de stationnement ni de couper le contact.
Il convient de noter que les EDR des véhicules légers, qui sont intégrés dans le module de commande des coussins gonflables, sont alimentés par des systèmes de secours intégrés dans les commandes du système de protection des occupants. Ces systèmes utilisent généralement des condensateurs pour fournir une tension continue de secours pendant une courte période, généralement comprise entre 150 et 300 ms, afin que les systèmes de protection des occupants, tels que les prétensionneurs de ceintures de sécurité et les coussins gonflables, puissent continuer à fonctionner et à se déployer même si le système électrique du véhicule est compromis. Dans l’ensemble, l’étude et la mise en œuvre de solutions visant à prévenir la perte de données dans des situations extrêmes comme un incendie après une collision et une perte d’énergie électrique peuvent considérablement améliorer la fiabilité et l’exhaustivité des données des EDRVL, contribuant ainsi à des enquêtes et des analyses plus précises sur les accidents.
10.0 Données des EDRVL comme éléments de preuve
Au Canada et aux États-Unis, le propriétaire du véhicule est généralement propriétaire de l’EDR/EDRVL et des données générées. Cela signifie que le propriétaire a le droit d’accéder aux données enregistrées par l’EDR/EDRVL et de les contrôler. Toutefois, dans certaines circonstances, les forces de l’ordre, les assureurs et les parties adverses dans les litiges civils, notamment, peuvent se voir accorder l’accès à ces données.
Dans le cas des forces de l’ordre, elles peuvent obtenir l’accès aux données des EDR/EDRVL par le biais d’un mandat de perquisition et utiliser les renseignements obtenus comme éléments de preuve devant les tribunaux. Un mandat du coroner peut être utilisé pour obtenir l’accès aux données des EDR/EDRVL dans les cas où aucune accusation n’est portée. Les éléments de preuve obtenus grâce au mandat du coroner ne peuvent pas être utilisés dans le cadre d’une procédure judiciaire engagée par la police.
En cas de sinistre, un titulaire de police a l’obligation de donner à son assureur l’accès à son véhicule accidenté, y compris l’accès aux données de l’EDR/EDRVL. Ces données peuvent être utilisées par les assureurs pour déterminer la responsabilité et faciliter le règlement des sinistres.
Dans un litige civil, la partie adverse peut demander et se voir accorder le droit d’accéder aux données de l’EDR/EDRVL dans le cadre du processus de communication préalable. Bien que l’EDR/EDRVL et les données générées puissent « appartenir » au propriétaire du véhicule, ces dernières peuvent être utilisées comme éléments de preuve contre le propriétaire ou le conducteur du véhicule dans le cadre d’une procédure civile ou pénale.
Il convient de noter que les lois et les règlements peuvent varier d’une administration à l’autre et que certaines exceptions à la règle générale de la propriété des données des EDR/HVED peuvent s’appliquer. Il est important de consulter les lois et les règlements locaux pour comprendre les spécificités de la propriété et de l’accès aux données des EDR/HVED dans une administration particulière.
L’imagerie des EDRVL nécessite des compétences et une formation spécialisées, et il est important de travailler avec des professionnels qualifiés qui connaissent bien l’équipement et les procédures. Au moment d’imager les données des EDRVL, il est important de suivre les protocoles appropriés de documentation en matière de photos et de vidéos. Cela consiste notamment à prendre des photos ou des vidéos de l’emplacement de l’EDRVL à bord du véhicule et à capturer des images de l’EDRVL lui-même ainsi que des étiquettes, des numéros de série ou d’autres renseignements identificatoires. En outre, effectuer une capture d’écran de l’ordinateur portable à l’aide d’une application de saisie d’écran compatible avec Windows peut s’avérer un moyen utile de documenter le processus d’imagerie des données des EDRVL.
Il est recommandé de sauvegarder les données des EDRVL à la fois dans leur format d’origine et dans un format plus accessible, tel qu’un fichier PDF. Les fichiers d’EDRVL natifs nécessitent généralement un logiciel de diagnostic spécialisé, dont l’ouverture peut être coûteuse. Par exemple, le logiciel de diagnostic Insite de Cummins est nécessaire pour visualiser une demande de services d’un moteur Cummins et le logiciel DDEC Reports est nécessaire pour visualiser le fichier Detroit Diesel Electronic Controls (DDEC) contenant les enregistrements de freinage dur et les enregistrements de dernier arrêt. En sauvegardant une copie des données au format PDF, les données peuvent être facilement ouvertes et visualisées à l’aide du logiciel gratuit Adobe Acrobat Reader, qui est largement disponible.
Lorsqu’il s’agit de véhicules très endommagés nécessitant la dépose de l’EDRVL, des précautions particulières doivent être prises pour manipuler les composants électroniques afin d’éviter tout dommage ou perte de données. Avant de retirer des composants électroniques, il est important de déconnecter et d’isoler les batteries principales du véhicule. Une fois les composants électroniques retirés, il est recommandé de stocker les MCE dans des sacs électroniques antistatiques. Ces sacs sont conçus pour empêcher l’électricité statique d’endommager les composants sensibles pendant la manipulation et le stockage. Toutefois, cela ne s’applique que si les dispositifs électroniques ne sont pas mouillés, exposés à l’humidité ou immergés. S’ils ont été immergés ou trempés au cours de l’extinction d’un incendie, ils doivent être enveloppés dans du papier et rangés dans des boîtes en carton perméables à l’air. Ces boîtes doivent être correctement étiquetées et scellées après le retrait des composants afin d’éviter tout dommage, contamination ou perte de données.
Le processus de retrait doit être soigneusement documenté de façon séquentielle, étape par étape, avec des photographies et, au besoin, des vidéos. Les composants retirés doivent être photographiés sous tous les angles, en accordant une attention particulière aux étiquettes d’identification et aux broches des connecteurs électriques. Les emplacements où les composants ont été retirés doivent également être documentés par des photographies afin d’illustrer le fait que les composants ont bien été retirés du véhicule. En outre, il est recommandé de photographier ou d’enregistrer une vidéo du composant retiré à côté de l’étiquette de certification du véhicule, du numéro d’identification de véhicule ou de tout autre élément d’identification confirmant qu’il provient du véhicule en question. Le numéro d’identification du véhicule, la date et le nom ou les initiales des membres du personnel qui ont retiré le composant doivent être inscrits sur le composant lui-même à l’aide d’un marqueur permanent. Veillez à ce que des photographies ou des vidéos de cette partie de la documentation soient également enregistrées.
Les boîtes contenant les composants doivent être scellées et, si elles doivent être expédiées, il faut faire appel à un transporteur approprié, et tous les renseignements de suivi doivent être documentés et placés dans des dossiers.
Les entités chargées du retrait des composants doivent avoir mis en place des procédures, des formulaires, des logiciels et des protocoles de suivi des éléments de preuve afin de s’assurer que ces derniers sont correctement documentés, suivis et stockés. Cela devrait inclure l’attribution de numéros de dossiers et d’éléments de preuve qui peuvent être documentés. Toute personne ayant accès aux composants, que ce soit à des fins d’examen, d’expédition ou de conservation, devrait être tenue d’indiquer son nom, la date, l’heure et la raison pour laquelle elle a manipulé les composants. Tous les composants retirés doivent être stockés dans une installation sécurisée, dont l’accès est réservé au personnel désigné. Lors de l’ouverture de contenants contenant des modules retirés d’un véhicule, le processus d’ouverture doit être documenté, de même que le personnel qui ouvre les contenants.
Une fois l’EDRVL retiré du véhicule, il peut être nécessaire d’utiliser un simulateur de camion ou un autre matériel spécial pour imager l’EDRVL. L’extraction des données à l’aide de ces outils peut être un processus complexe, et il est important de respecter les procédures appropriées pour garantir des extractions précises et fiables. L’imagerie des données hors du véhicule doit être documentée comme si les composants se trouvaient toujours dans le véhicule. Il est recommandé de créer un enregistrement séquentiel et pas à pas du processus d’imagerie des données, en documentant chaque étape de la procédure.
Dans le contexte des données des EDR/EDRVL, la documentation relative à la chaîne de possession doit inclure des détails tels que la date et l’heure de l’extraction des données, l’identité de la ou des personnes qui ont extrait les données, ainsi que l’équipement et le logiciel spécifiques utilisés pour extraire les données. Cette documentation doit être soigneusement tenue à jour et conservée afin que les données puissent être utilisées comme preuves devant les tribunaux, au besoin.
Le maintien d’une chaîne de chaîne de possession complète et vérifiable est essentiel pour garantir l’intégrité et la fiabilité des éléments de preuve dans les procédures judiciaires. En documentant la possession et le traitement des éléments de preuve, la chaîne de possession permet de savoir clairement qui a eu le contrôle des éléments de preuve et à quel moment, ce qui permet d’établir leur authenticité et d’empêcher leur altération ou modification.
Le défaut de maintenir une chaîne de chaîne de possession complète et fiable peut avoir de graves conséquences. Cela peut mener à une contestation de l’intégrité des éléments de preuve, entraînant le rejet d’une affaire ou des sanctions judiciaires défavorables. Sans une chaîne de possession correctement documentée, la crédibilité et la fiabilité des preuves peuvent être remises en question, ce qui risque de compromettre l’issue de l’affaire.
11.0 Formation relative aux EDRVL
Au fil des ans, l’adoption des EDRVL dans le marché des camions et des autobus lourds en Amérique du Nord a considérablement augmenté. Fait remarquable, cette croissance s’est produite malgré l’absence d’un règlement imposant leur installation à bord des véhicules au Canada, aux États-Unis ou au Mexique. L’élément moteur derrière cette augmentation de la demande est le besoin de données des parcs de camions et d’autobus commerciaux. La technologie appliquée aux camions et autobus lourds suit une tendance similaire à celle des EDR des véhicules de tourisme, dans lesquels des capteurs préexistants, des réseaux de données de véhicule et des MCE sont utilisés pour intégrer un EDRVL. Cette approche élimine le besoin de capteurs, de câblage ou de MCE supplémentaires, ce qui se traduit par une solution plus rentable pour les gestionnaires de parcs de véhicules. En tirant parti des systèmes existants, l’EDRVL peut saisir et enregistrer des données cruciales sans nécessiter de modifications importantes de l’infrastructure du véhicule.
Comme indiqué dans le présent document, l’EDRVL est intégré dans les MCE et les capteurs qui remplissent des fonctions primaires liées au fonctionnement sûr, propre et efficace du moteur turbodiesel et de la chaîne cinématique. En outre, ils contribuent au fonctionnement de divers systèmes du véhicule comme le système de freinage antiblocage, le système antipatinage, le système de contrôle électronique de stabilité et les systèmes avancés d’aide à la conduite.
Étant donné que l’EDRVL est une fonction ajoutée à un MCE avec d’autres fonctions primaires, il pourrait être comparé à l’ajout d’une application à votre téléphone intelligent mobile. L’EDRVL exploite les capteurs et les données existants, en saisissant les renseignements de ces capteurs lorsqu’ils sont déclenchés.
Étant donné que l’EDRVL, comme l’EDR, repose sur d’autres systèmes du véhicule, il est essentiel d’avoir une formation et une compréhension adéquates de ces systèmes, commandes, capteurs et réseaux de données de véhicule fondamentaux. Ces connaissances sont essentielles pour comprendre les données des EDRVL et déterminer les possibilités et les limites de l’utilisation de ces données à des fins d’analyse et d’interprétation.
Il existe actuellement plusieurs programmes de formation établis sur les EDRVL aux États-Unis. Plusieurs auteurs du présent document possèdent une vaste expérience en tant qu’instructeurs pour deux cours spécifiques énumérés ci-dessous. Il est important de noter que les références en matière de formation fournies dans le présent document reflètent les données publiées sur les pages Web liées au moment de la rédaction. Veuillez noter, toutefois, que ces renseignements peuvent ne plus être exacts ou disponibles.
11.1 Forensic Training Group, LLP
Forensic Training Group, LLP, dans le Tennessee, propose des cours de formation adaptés aux agents d’application de la loi et aux reconstitutionnistes d’accidents. Leurs cours portent sur des sujets comme les techniques de reconstitution d’accidents de camions lourds, l’utilisation des EDRVL dans la formation des analystes aux enquêtes sur les accidents de la route et l’utilisation du dispositif Forensic Link Adapter (FLA) de Synercon Technologies et du logiciel TruckCRYPT. Les instructeurs sont MM. Tony Becker, Scott Skinner, James Loftis, Steve Anderson et Jason Riddle.
De plus amples renseignements sont disponibles sur la page Web de Forensic Training Group, LLP à l’adresse suivante.
11.2 Institute of Police Technology & Management
L’Institute of Police Technology & Management (IPTM) offre un cours sur les EDRVL, à savoir le cours Heavy Vehicle Electronic Control Module Data Use in Crash Reconstruction. Ce cours proposé par l’IPTM, dont les frais d’inscription s’élèvent actuellement à 1 195,00 $ US, est d’une durée de 40 heures sur 5 jours.
De plus amples renseignements sont disponibles sur le site Web de l’IPTM .
11.3 Center for Public Safety de l’Université Northwestern
Le Center for Public Safety de l’Université Northwestern traite de certains des renseignements de base sur les EDRVL dans son Heavy Vehicle Crash Reconstruction Course. Les frais d’inscription de ce cours s’élèvent actuellement à 600 $ US et il est nécessaire d’avoir suivi avec succès les cours 1 et 2 intitulés « Traffic Crash Reconstruction » de Northwestern.
De plus amples renseignements sont disponibles sur le site Web du Center for Public Safety de l’Université Northwestern.
11.4 SAE International
La SAE offre depuis 2010 un programme de formation technique continue sur les EDRVL. Il s’agit du cours Accessing and Interpreting Heavy Vehicle Event Data Recorders (code cours C1022) de la SAE. Ce cours a été élaboré et donné à l’origine par MM. Timothy Cheek de DELTA |v| Forensic Engineering, Inc. (Charlotte, NC) et John Steiner de Mecanica Scientific Services Corporation (Oxnard, CA). Depuis 2010, le cours a connu une évolution et une amélioration afin de suivre l’évolution rapide des technologies dans le domaine des camions et des autobus lourds, qui sont à la base des EDRVL. Le cours C1022 de la SAE couvre les systèmes fondamentaux des EDRVL et les caractéristiques et traits de chaque EDRVL que l’on trouve dans les différents MCE des moteurs et des systèmes de sécurité. Le cours passe également en revue de nombreuses études de cas et les principes fondamentaux de l’analyse des données des EDRVL dans le cadre de la reconstitution d’accidents. Aujourd’hui, ce cours est donné par MM. Timothy Austin, Timothy Cheek, Matt DiSogra, Wesley Grimes, Bradley Higgins, David Plant, John Steiner et Greg Wilcoxson. Le cours C1022 dure quatre jours et demi et les frais d’inscription s’élèvent actuellement à 2 499,00 $ US.
En 2019, MM. Wesley Grimes et Gregory Wilcoxson ont organisé et commencé à donner un cours technique de formation continue qui fait suite au cours C1022. Il s’agit du cours Advanced Applications of Heavy Vehicle EDR Data (code cours C1901) de la SAE. D’une durée de deux jours, le cours C1901 vise à approfondir les méthodes numériques et les méthodologies d’analyse avancées pour les données des EDRVL. Il est possible de le suivre après avoir réussi le cours C1022. Les frais de scolarité de ce cours s’élèvent actuellement à 1 349,00 $ US.
De plus amples informations sur le cours SAE no C1022, Accès et interprétation des enregistreurs de données d'événements de véhicules lourds sont disponibles sur le site Web de la SAE.
De plus amples renseignements sur le cours C1901, Advanced Applications of Heavy Vehicle EDR Data, de la SAE sont disponibles sur le site Web de la SAE : https://www.sae.org/learn/content/c1901/ De plus amples informations sur le cours SAE n° C1901, Applications avancées des données EDR pour véhicules lourds sont disponibles sur le site Web de la SAE.
12.0 Pratiques exemplaires
Le document sur la pratique recommandée SAE J2728 s’applique aux EDRVL pour les véhicules lourds terrestres à roues de plus de 4 545 kg (10 000 livres américaines), communément appelés véhicules de classe 3 à 8. La pratique recommandée SAE J2728 a été élaborée par le Truck and Bus Event Data Recorder Committee de la SAE et publiée pour la première fois en 2010. En 2020, une version révisée de la pratique recommandée SAE J2728 a été publiée.
Comme indiqué dans la pratique recommandée SAE J2728-1 :
Portée: ce document fournit une liste d’éléments de données et de déclencheurs d’événements pour l’enregistrement des données relatives aux enquêtes sur les accidents de véhicules lourds. La liste des éléments de données comprend la ou les sources recommandées et le formatage.
Objectif: le présent document fournit des recommandations en matière de conception et de rendement nécessaires à la mise au point d’un EDRVL doté de capacités minimales. Il ne vise pas à empêcher, contraindre ou limiter les capacités supplémentaires qui pourraient être combinées ou contenues dans tout EDRVL actuel ou futur, tant que les capacités minimales de conception et de rendement décrites dans le présent document sont maintenues.
12.1 SAE J2728-1 Déclencheurs d’événements d’EDRVL
Comme indiqué dans la pratique recommandée SAE J2728-1:
Le déclencheur d’événement est un ensemble de critères qui, s’ils sont remplis, entraînent l’enregistrement d’un événement d’EDRVL dans une mémoire non volatile. L’EDRVL devrait enregistrer un événement si l’une des conditions suivantes se présente :
- déclencheur d’accélération: la vitesse du véhicule change à un rythme supérieur au seuil programmable fixé entre 8,0 km/h/s (5,0 mi/h/s) et 22,5 km/h/s (14,0 mi/h/s). Le changement de vitesse du véhicule peut être positif ou négatif et persister au-delà de ce seuil pendant au moins 0,5 seconde. Le début de l’événement d’accélération correspond au moment où le seuil est franchi. Un seuil courant est de 11,3 km/h/s (7,0 mi/h/s);
- déclencheur de dernier arrêt: ce déclencheur vise à saisir un événement lorsque le véhicule s’est arrêté complètement pendant un certain temps. Le démarrage de l’événement de dernier arrêt aura lieu au moment où le seuil est franchi. Un seuil suggéré est lorsque la vitesse du véhicule chute en dessous de 3,0 km/h (1,9 mi/h) pendant 15 secondes ou plus. Pour éviter que les événements de dernier arrêt ne soient écrasés par le mouvement du véhicule après un incident d’intérêt, le déclencheur de dernier arrêt ne peut pas se reproduire tant que la vitesse du véhicule n’atteint pas 24,0 km/h (14,9 mi/h) ou plus pendant un minimum de 6 secondes. Le fait de couper le contact ne déclenche pas directement un événement de dernier arrêt;
- déclencheur du système de sécurité: les systèmes installés à des fins de commande ou d’alertes du conducteur provenant des systèmes de sécurité devraient déclencher l’enregistrement d’un événement. (Les signaux de déclenchement recommandés provenant de systèmes connus sont énumérés dans le tableau 1 de la pratique recommandée et comprennent le système de retenue de sécurité, le système de freinage antiblocage, le régulateur de vitesse adaptatif/freinage automatisé et le système de contrôle électronique de stabilité).
Le seuil d’accélération par défaut recommandé de 11,3 km/h/s (7,0 mi/h/s) est spécifié pour les applications typiques des camions lourds sur route. Sachant que d’autres configurations, applications ou vocations de véhicules peuvent nécessiter un ajustement du taux de variation de la vitesse du véhicule du déclencheur d’événement, le taux peut être programmé à l’intérieur de la plage correspondant aux spécifications ci-dessus.
Les FÉO devraient mettre en œuvre les déclencheurs d’événements décrits dans la norme SAE J2728-1 comme base de référence. En outre, les FÉO sont encouragés à envisager d’incorporer des déclencheurs d’événements supplémentaires concernant les systèmes, les dispositifs de sécurité et les mécanismes de commande propres à leur véhicule, afin d’améliorer les capacités des EDRVL.
12.2 SAE J2728-1 Éléments de données des EDRVL
Le document SAE J2728-1 présente une liste complète d’éléments de données normalisés répartis en deux groupes : données d’en-tête et tampons d’éléments de données. Les données d’en-tête comprennent des éléments qui permettent de déterminer l’heure et l’emplacement de l’événement, ainsi que la plupart des états statiques du véhicule au moment de l’événement (tels que les heures de fonctionnement du moteur, le compteur kilométrique, le rapport de pont arrière, le numéro d’identification de véhicule, etc.). D’autre part, les tampons d’éléments de données comprennent des données antérieures et postérieures au déclenchement, ce qui permet d’examiner le fonctionnement du véhicule avant le déclenchement de l’événement et pendant une certaine période après le déclenchement (notamment la vitesse du véhicule, l’état des freins, le régime du moteur, le commutateur d’embrayage, la position de la pédale d’accélérateur, etc.).
Comme indiqué dans le document J2728-1:
Les éléments de données énumérés dans cette pratique recommandée ne sont pertinents que si le véhicule est équipé du capteur ou du système associé et que leur état est disponible pour l’EDRVL. Bien que le fabricant de l’EDRVL puisse déterminer les éléments de données applicables à son système, les fabricants sont invités à consulter le tableau 2 du document J2728-1 pour obtenir une liste des éléments de données recommandés comme minimum. Les utilisateurs de cette pratique recommandée peuvent inclure des éléments de données autres que ceux énumérés dans le tableau 2. Il est recommandé d’utiliser le document SAE J1939-71 comme référence pour le formatage des éléments de données, le cas échéant.
Les FÉO doivent intégrer les éléments de données du tableau 2 du document J2728-1 en tant qu’exigence minimale, lorsqu’ils s’appliquent, et dans la mesure du possible, tout en envisageant d’inclure des éléments de données supplémentaires en plus de la liste recommandée.
12.3 SAE J2728-1 Taux d’échantillonnage des données et durée d’enregistrement des EDRVL
Comme indiqué dans le document J2728-1 :
L’EDRVL doit enregistrer les données collectées avant et après l’atteinte du seuil de déclenchement de l’événement. C’est pourquoi un registre tampon de pré-déclenchement doit continuellement écrire dans la mémoire volatile tous les éléments de données nécessaires qui sont disponibles avant qu’un enregistrement d’événement ne soit déclenché (c.-à-d. lorsque les critères de déclenchement de l’événement sont remplis) dans une mémoire tampon circulaire premier entré-premier sorti continuellement mise à jour. De même, dès qu’un événement est déclenché, l’EDRVL doit immédiatement stocker le reste de l’enregistrement des éléments de données de l’EDRVL requis pour le reste de l’événement tel que défini. Par défaut, l’EDRVL doit fournir une capacité minimale de 15 secondes avant l’événement, avec des données écrites à une fréquence de 10 Hz, et une capacité minimale de 15 secondes après l’événement, pour un minimum de 30 secondes de données liées à l’événement. La capacité minimale avant et après l’événement n’a pas pour but d’exclure les dispositifs ayant une capacité supérieure.
Les FÉO doivent veiller à ce que leurs EDRVL respectent les exigences minimales en matière de taux d’échantillonnage des données et de durée d’enregistrement. Il est important de noter que bien que le respect des exigences minimales soit essentiel, les fabricants sont encouragés à mettre au point des HVDER à capacités accrues plus afin d’améliorer les capacités de saisie des données.
Pratiques exemplaires
SAE J2728-1 déclencheurs d’événements d’EDRVL
Les FÉO devraient mettre en œuvre les déclencheurs d’événements décrits dans le document SAE J2728-1 comme base de référence. En outre, les FÉO sont encouragés à envisager d’incorporer des déclencheurs d’événements supplémentaires concernant les systèmes, les dispositifs de sécurité et les mécanismes de commande propres à leur véhicule, afin d’améliorer les capacités des EDRVL.
SAE J2728-1 éléments de données des EDRVL
Les FÉO devraient intégrer les éléments de données du tableau 2 du document sur la norme SAE J2728-1 en tant qu’exigence minimale, lorsqu’ils s’appliquent et dans la mesure du possible, tout en envisageant d’inclure des éléments de données supplémentaires en plus de la liste recommandée.
SAE J2728-1 taux d’échantillonnage des données et durée d’enregistrement des EDRVL
Les FÉO doivent veiller à ce que leurs EDRVL respectent les exigences minimales en matière de taux d’échantillonnage des données et de durée d’enregistrement. Il est important de noter que bien que le respect des exigences minimales soit essentiel, les fabricants sont encouragés à mettre au point des HVDER à capacités accrues plus afin d’améliorer les capacités de saisie des données.
13.0 Lignes directrices
13.1 Accès à l’EDRVL
L’EDRVL est optimisé pour le véhicule spécifique dans lequel il est installé, et la récupération des données dépend du motoriste. Contrairement aux EDR des véhicules de tourisme, il n’existe pas d’outil universellement compatible pour l’extraction des données des EDRVL chez la plupart des fabricants. Ce processus nécessite plusieurs outils logiciels et matériels de diagnostic de FÉO coûteux.
Pour résoudre ce problème et simplifier l’accès aux données, il est nécessaire de normaliser les EDRVL dans l’ensemble des FÉO. Cela permettrait d’utiliser un outil commun pour accéder aux données des camions et des autobus commerciaux.
En normalisant les EDRVL, il est possible d’élaborer un outil commun qui permettrait aux organismes gouvernementaux, aux chercheurs, aux gestionnaires de parcs de véhicules, aux forces de l’ordre et aux consultants indépendants d’accéder aux données des camions et des autobus commerciaux sans avoir à utiliser plusieurs outils ni à suivre plusieurs formations.
Compte tenu de l’expertise des fabricants de châssis de véhicules commerciaux en matière d’architecture et d’intégration électroniques embarquées, ainsi que des connaissances des motoristes et des fabricants de systèmes de sécurité des véhicules commerciaux concernant les exigences fonctionnelles et les enjeux de mise en œuvre des EDRVL, la collaboration entre les FÉO et les fournisseurs d’outils de diagnostic tiers approuvés par les FÉO est encouragée.
Cette collaboration peut déboucher sur l’élaboration d’un outil d’imagerie normalisé spécialement conçu pour les EDRVL, rendant l’accès aux données plus efficace et plus accessible pour les différents constructeurs de véhicules commerciaux.
13.2 EDRVL dans plusieurs MCE des FÉO
Dans le passé, l’EDRVL se trouvait principalement dans le MCE du moteur des camions ou des autobus commerciaux. Ce MCE est responsable de diverses fonctions de fonctionnement essentielles comme la protection du moteur, le diagnostic du moteur, l’économie de carburant, la lutte antiémissions et la régulation de la vitesse. Toutefois, grâce aux progrès technologiques, les données de type EDRVL peuvent désormais être trouvées dans d’autres MCE, associés à des systèmes comme le freinage antiblocage et le contrôle de stabilité, l’alerte de collision et le freinage actif, la sortie involontaire de voie et la transmission automatisée.
La normalisation des EDRVL par le biais d’une solution basée sur les FÉO doit tenir compte des variations de l’EDRVL entre différents MCE. La normalisation ne devrait pas viser à dicter où les fabricants choisissent de stocker les données, mais plutôt à empêcher la dispersion des données d’EDRVL entre plusieurs MCE. L’idéal serait d’enregistrer toutes les données dans un seul MCE. On pourrait accéder à ce MCE unique soit par la méthode de connexion privilégiée, à savoir le connecteur de liaison de diagnostic défini par la norme J1939/13 à bord d’un camion lourd, soit directement à ce MCE au cas où le véhicule subirait des dommages importants empêchant la connexion par le connecteur de liaison de diagnostic.
Il est important de noter qu’à l’instar des EDR des véhicules de tourisme, l’EDRVL est un algorithme de programmation exécuté sur un MCE préexistant pourvu d’un processeur (ou de processeurs) ainsi que d’une mémoire interne. L’EDRVL n’est pas un enregistreur de données supplémentaire ou autonome pourvu de son propre réseau de capteurs.
Pour faciliter la normalisation, les FÉO sont encouragés à élaborer un algorithme de programmation qui regroupe les données de type EDRVL dans un seul MCE. Cette approche peut rationaliser les processus de collecte et d’extraction des données, facilitant ainsi l’accès aux données d’EDRVL complètes provenant des camions et des autobus commerciaux.
13.3 Survivabilité des EDRVL – perte d’énergie électrique
Lorsqu’un véhicule subit des dommages importants qui écrasent ou détruisent ses batteries principales, ou lorsque les câbles de ces dernières sont pincés, mis à la terre ou coupés, une perte d’énergie électrique peut se produire, entraînant l’impossibilité d’enregistrer des données. Cette perte totale d’énergie électrique se produit généralement dans des situations graves.
La survivabilité des données des EDRVL en cas de perte d’énergie électrique varie en fonction du dispositif concerné. Certains EDRVL sont conçus pour être plus robustes et moins susceptibles de perdre des données dans de tels scénarios. Certains EDRVL sont en mesure de stocker 20, 30 ou 90 secondes de données de pré-déclenchement. En cas de perte d’énergie électrique, ces EDRVL écrivent les données précédant et suivant le déclenchement dans la mémoire avant de cesser de fonctionner. En revanche, certains EDRVL n’écriront aucune donnée en cas de pertes d’énergie électrique, car ils nécessitent le serrage du frein de stationnement ou un signal de coupure de contact pour stocker des données en mémoire.
Pour garantir la saisie des données vitales d’une collision, il est essentiel de disposer d’une alimentation électrique de secours. Le fait de compter sur une source d’énergie externe peut présenter des difficultés si l’intégrité structurelle autour de l’EDRVL est compromise. Toutefois, les EDRVL dotés de sources d’alimentation de secours internes, telles que des batteries ou des condensateurs internes, peuvent fournir de l’énergie même si l’alimentation principale est interrompue.
Pour améliorer la survivabilité des EDRVL en cas de perte d’énergie électrique, les FÉO sont encouragés à élaborer des algorithmes de déclenchement qui ne dépendent pas du serrage d’un frein de stationnement ou d’un signal de coupure de contact pour stocker des données dans une mémoire non volatile. En outre, les FÉO devraient mettre au point des EDRVL comportant des solutions intégrées de sources d’alimentation de secours internes et concevoir des stratégies appropriées pour préserver les données en cas de perte d’énergie électrique. Ces mesures contribueraient à garantir la disponibilité de données critiques sur les collisions, même dans des circonstances difficiles.
13.4 Survivabilité des EDRVL – incendie
Il est essentiel de mettre au point des solutions efficaces pour atténuer la perte de données dans des incendies survenant à la suite d’une collision afin de garantir la fiabilité des EDRVL. Les camions et les autobus commerciaux sont confrontés aux défis posés par les incendies, car les MCE contenant l’EDRVL sont vulnérables aux incendies, qu’ils soient installés sur le côté du moteur ou à l’intérieur de la cabine.
Pour établir un cadre industriel normalisé et garantir la survivabilité des données en cas d’incendie, il est important de définir des exigences claires quant à la survivabilité en cas d’incendie. L’omission de mettre en œuvre des exigences en matière d’incendie peut entraîner la perte de données précieuses. Il est donc nécessaire de mener des recherches spécifiques sur la survivabilité en cas d’incendie afin de déterminer les exigences minimales.
Ces exigences décrivent les mesures nécessaires pour éviter la perte de données lors d’incendies suivant une collision. Il est essentiel de mener des recherches spécifiques sur la survivabilité en cas d’incendie afin de déterminer les exigences minimales auxquelles les FÉO doivent se conformer.
La question de la perte de données dans des incendies suivant une collision mérite d’être abordée par les FÉO, en particulier au sein des plateformes concernées telles que le SAE J2728 Truck and Bus Event Data Recorder Committee. En participant à des efforts de collaboration, les FÉO peuvent contribuer à l’élaboration de solutions et de stratégies de conception efficaces qui atténuent le risque de perte de données attribuable à des incendies suivant une collision.
13.5 Horodatage synchronisé des EDRVL
L’horodatage dans les EDRVL joue un rôle essentiel en fournissant des informations de synchronisation précises et synchronisées pour les événements enregistrés. En utilisant une référence temporelle normalisée dans diverses sources de données, il devient plus facile pour les utilisateurs finaux, tels que les organismes gouvernementaux, les chercheurs, les forces de l’ordre et les consultants indépendants, d’analyser et de corréler les données enregistrées aux événements avec précision et de reconstituer la séquence des événements ayant mené à un incident ou un accident.
Outre les enregistrements d’événements liés à des incidents spécifiques, les EDRVL enregistrent souvent des plans figés ou des données sélectives relatifs à des codes de diagnostic déclenchés lors d’un événement. Toutefois, les horodatages de ces événements peuvent s’avérer « approximatifs » ou relatifs, ce qui rend difficile l’établissement d’une corrélation précise avec l’incident ou l’accident.
Une approche courante aux fins de l’obtention d’horodatages synchronisés consiste à faire appel à une horloge interne (dans le véhicule) diffusant la date et l’heure conformément à la norme SAE J1939, synchronisée avec un récepteur GPS, un téléphone cellulaire ou une autre source de temps externe. Ces méthodes permettent d’établir une référence temporelle cohérente et précise pour toutes les données enregistrées.
Les FÉO devraient adopter une horloge commune synchronisée pour toutes les données enregistrées dans les EDRVL. En mettant en œuvre cette approche, les FÉO peuvent s’assurer que les données d’événements propres à un incident et les instantanés de codes de défectuosité ou les enregistrements de plans figés sont horodatés avec précision, ce qui facilite une analyse et une compréhension plus complètes des événements enregistrés.
Directives
Accès aux EDRVL
La collaboration entre les FÉO et les fournisseurs d’outils de diagnostic tiers approuvés par les FÉO est encouragée. Cette collaboration peut déboucher sur l’élaboration d’un outil d’imagerie normalisé spécialement conçu pour les EDRVL, rendant l’accès aux données plus efficace et plus accessible pour les différents constructeurs de véhicules commerciaux.
EDRVL dans plusieurs MCE des FÉO
Pour faciliter la normalisation, les FÉO sont encouragés à élaborer un algorithme de programmation qui regroupe les données de type EDRVL dans un seul MCE. Cette approche peut rationaliser les processus de collecte et d’extraction des données, facilitant ainsi l’accès aux données complètes des EDRVL des camions et des autobus commerciaux.
Survivabilité des EDRVL – perte d’énergie électrique
Pour améliorer la survivabilité des EDRVL en cas de perte d’énergie électrique, les FÉO sont encouragés à élaborer des algorithmes de déclenchement qui ne dépendent pas du serrage d’un frein de stationnement ou d’un signal de coupure de contact pour stocker des données dans une mémoire non volatile. En outre, les FÉO devraient mettre au point des EDRVL comportant des solutions intégrées de sources d’alimentation de secours internes et concevoir des stratégies appropriées pour préserver les données en cas de perte d’énergie électrique. Ces mesures contribueraient à garantir la disponibilité de données critiques sur les collisions, même dans des circonstances difficiles.
Survivabilité des EDRVL – incendie
La question de la perte de données dans des incendies suivant une collision mérite d’être abordée par les FÉO, en particulier au sein des plateformes concernées telles que le SAE J2728 Truck and Bus Event Data Recorder Committee. En participant à des efforts de collaboration, les FÉO peuvent contribuer à l’élaboration de solutions et de stratégies de conception efficaces qui atténuent le risque de perte de données attribuable à des incendies suivant une collision.
Horodatage synchronisé des EDRVL
Les FÉO devraient adopter une horloge commune synchronisée pour toutes les données enregistrées dans les EDRVL. En mettant en œuvre cette approche, les FÉO peuvent s’assurer que les données d’événements propres à un incident et les instantanés de codes de défectuosité ou les enregistrements de plans figés sont horodatés avec précision, ce qui facilite une analyse et une compréhension plus complètes des événements enregistrés.
14.0 Résumé et voie à suivre
Le présent document fournit un aperçu détaillé des questions relatives à l’utilisation des EDRVL et comprend un ensemble de pratiques exemplaires et de lignes directrices que les FÉO devraient prendre en considération pour le développement de ces dispositifs. Il est fortement recommandé de respecter les pratiques recommandées par la SAE en ce qui concerne les déclencheurs d’événements de l’EDRVL, les éléments de données de l’EDRVL, ainsi que les taux d’échantillonnage des données et la durée d’enregistrement de l’EDRVL. Les FÉO doivent également suivre les lignes directrices proposées concernant l’accès à l’EDRVL, l’EDRVL dans plusieurs MCE, la survivabilité de l’EDRVL et la synchronisation de l’horodatage de l’EDRVL.
L’accent a été mis sur les EDRVL des FÉO, qui sont généralement installés dans les véhicules des classes 3 à 8. Ces véhicules pèsent plus de 4 536 kg et sont équipés soit du bus de communication série SAE J1708/J1587, soit du bus de communication CAN J1939.
Le document ne traite pas des technologies de gestion des parcs de véhicules du marché secondaire qui enregistrent systématiquement des données, telles que les enregistreurs de trajet ou les dispositifs de consignation électronique (DCE) propres aux incidents pour les heures de service des conducteurs, les dispositifs télématiques GPS ou les enregistreurs de données vidéo (caméras-témoins).
Dans le contexte du présent document, les FÉO désignent les fabricants de châssis, les motoristes et les fabricants de systèmes de sécurité pour véhicules commerciaux. Ils incluent également les concepteurs et les constructeurs de camions et d’autobus de poids moyen et de gros tonnage, les fournisseurs de rang 1 de moteurs, de boîtes de vitesses et de systèmes de sécurité pour véhicules lourds, ainsi que des fabricants d’outils d’entretien qui pourraient élaborer un outil commun d’imagerie (d’extraction) de données d’EDRVL.
Les EDRVL peuvent fournir des renseignements précieux sur les causes d’un accident, les manœuvres d’évitement du conducteur et la dynamique de l’accident, qui sont des éléments cruciaux dans les enquêtes sur les accidents. Les FÉO jouent un rôle essentiel dans l’utilisation efficace des EDRVL en veillant à leur intégration et au respect des exigences minimales. En adoptant une approche proactive, les FÉO peuvent faciliter la collecte de données précieuses susceptibles d’améliorer considérablement la sécurité routière et les enquêtes sur les accidents.
15.0 Remerciements
L’équipe de recherche de Mecanica Scientific tient à reconnaître et remercier :
le lt Timothy Austin et MM. Timothy Cheek, Matt DiSogra, David Plant et Greg Wilcoxson pour leurs contributions, leur expertise et leurs conseils dans le cadre de ce projet. L’équipe voudrait reconnaître et remercier l’équipe de Mecanica Scientific Services pour sa contribution relative à la publication du présent document.
16.0 Références
Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux (dossier no T8080-160062), livrable no 1, Highway Safety Research Reference List; Oxnard, CA, USA; 11 mai 2018.
Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux (dossier no T8080-160062), livrable no 2, Database of Highway Safety Research; Oxnard, CA, USA; 11 mai 2018.
Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux (dossier no T8080-160062), livrable no 3, Commercial Bus HVEDR Feasibility Report; Oxnard, CA, USA; 11 mai 2018.
Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux (dossier no T8080-160062), livrable no 4, All Devices Summary Report; Oxnard, CA, USA; 11 mai 2018.
Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux (dossier no T8080-160062), livrable no 5, Summary Report of International Commercial Vehicle EDR Industry Standards and Recommended Practices; Oxnard, CA, USA; 11 mai 2018.
Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux (dossier no T8080-160062), livrable no 6, Commercial Bus HVEDR Feasibility Report; Oxnard, CA, USA; 11 mai 2018.
Étude de faisabilité de Transports Canada relative aux EDRVL d’autobus commerciaux (dossier no T8080-160062), livrable no 7, Final Report; Oxnard, CA, USA; 11 mai 2018.
AUSTIN, T., T. Cheek, D. Plant, J. Steiner et L. Lackey. « SAE C1022: Accessing and Interpreting Heavy Vehicle Event Data Recorders », modules 1 à 10, présentation du cours par SAE International (oct. 2016).
AUSTIN, T., D. Plant et J. LeFevre. « Using NFPA Compliant Fire Apparatus Vehicle Data Recorders for Collision Investigation – Weldon Type 6444 », document technique SAE 2015011446 (2015), doi:10.4271/2015011446
BAYAN, F.P., A.D. Cornetto, A. Dunn, C.B. Tanner et al. « Comparison of Heavy Truck Engine Control Unit Hard Stop Data with Higher-Resolution On-Vehicle Data », SAE Int. J. Commer. Veh., vol. 2, no 1 (avr. 2008), p. 2938. doi : 10,4271-2009-01-0879
BORTOLIN, R., S. van Nooten, M. Scodeller, D. Alvar et al. « Validating Speed Data from Cummins Engine Sudden Deceleration Data Reports », SAE Int. J. Passeng. Cars – Mech. Syst., vol. 2, no 1 (2009), pp. 970 982, doi:10.4271/2009010876.
Bureau of Transportation Statistics, « Project 5: Developing Common Data on Accident Circumstances », présentation de projet lors de la conférence « Safety in Numbers » de 2002 du Department of Transportation des États-Unis (janvier 2002).
CHIDESTER, A., J. Hinch, T. C. Mercer et K. S. Schultz. « Recording Automotive Crash Event Data », présenté au International Symposium on Transportation Recorders, Arlington, Virginie (3 au 5 mai 1999).
CHIDESTER, A., J. Hinch et T. A. Roston. « Real World Experience with Event Data Recorders », document no 247, Proceedings of Seventeenth International Technical Conference on Enhanced Safety of Vehicles, Amsterdam (4 au 7 juin 2001).
Commission des Communautés européennes, spécifications techniques du tachygraphe numérique, Règlement de la Commission (CE) no 1360/2002 (13 juin 2002).
DANNENBERG, R., « Multiplexing Consumer Electronic Products in Truck Applications », document technique SAE 982757 (1998), doi:10.4271/982757.
DASILVA, M.P. « Analysis of Event Data Recorder Data for Vehicle Safety Improvement », NHTSA Report no DOT-VNTSC-NHTSA-08-01, Springfield, Virginie : National Technical Information Service (oct. 2008).
Federal Motor Carrier Safety Administration, et National Highway Transportation Safety Administration, « Large Truck Crash Causation Study », consulté en janvier 2018.
GABLER, H.C., D.J. Gabauer, H. L. Newel et M.E. O’Neill. « Use of Event Data Recorder (EDR) Technology for Highway Crash Data Analysis, Final Report », projet 17-24 du NCHRP, préparé pour le Transportation Research Board de la National Academies of Science (déc. 2004).
GABLER, H.C., J. Hinch et J. C. Steiner. « Event Data Recorders: A Decade of Innovation », Warrendale, SAE International (2007), ISBN:9 780 768 020 663.
GRAZ, T. « ECBOS – Enhanced Coach and Bus Occupant Safety, Summary Report », Technical University GRSG-86-4, projet no 1999-RD.11130 (janv. 2000).
GROSE, G., L. Tunick, E. Cavicchioli, I. Cawdron et S. Wood. « NHTSA EDR NPRM: Small Volume Manufacturer Lead-time », présentation à la NHTSA, Washington, D.C. (janv. 2013).
HENDERSHOT, K., P. Tiessen. « (Canada) Heavy Vehicle Event Data Recorders GRSG-121-28 »; Commission économique pour l’Europe des Nations Unies, Forum mondial pour l’harmonisation des règlements concernant les véhicules (WP.29), 121e réunion du Groupe de travail des dispositions générales de sécurité (GRSG), Genève, Suisse (avril 2021).
HYND, D., et M. McCarthy. « Study on the Benefits Resulting from the Installation of Event Data Recorders, Final Report », préparé pour la Commission européenne, DG MOVE, rapport de projet no PPR707, publié par le Transport Research Laboratory (2014).
KANE, S., E. Liberman, T. DiViesti, F. Click, et M. MacDonald. « An Examination of the National Highway Traffic Safety Administration and the National Aeronautics and Space Administration Engineering Safety Center Assessment and Technical Evaluation of Toyota Electronic Throttle Control (ETC) Systems and Unintended Acceleration », Rehoboth, Massachusetts : Safety Research & Strategies, Inc (mai 2011).
KNIGHT, S.K. « Federal Motor Vehicle Safety Standards; Event Data Recorders: Part 571 Federal Motor Vehicle Safety Standards, §571.405 », Federal Register, vol. 77, no 240 (2012), p. 74159.
LAMBOURN, R.F. « Accident Investigation: Tachographs » dans Encyclopedia of Forensic Sciences, Academic Press, (2000), pp. 48 à 58, doi:10.1006/nwfs.2000.0482.
---. « The Analysis of Tachograph Charts for Road Accident Investigation », Forensic Science International, vol. 28, no 3 et 4 (1985), pp. 181 à 199, doi:10.1016/03790738 (85) 901306.
LEE, W. et I. Han. « Development of an Event Data Recorder and Reconstruction Analysis », document technique de la SAE 2004011180 (2004), doi:10.4271/2004011180.
Legal Information Institute, « 49 CFR Part 563 – EVENT DATA RECORDERS », consulté en janvier 2018.
MARTINEZ, R. « National Transportation Safety Board Safety Recommendation H-97-10-18 » Washington, D.C. (juillet 1997).
MESSERSCHDMIDT, W. et J. Muttart. « A Statistical Analysis of Data from Heavy Vehicle Event Data Recorders », SAE Int. J. Commer. Veh., vol. 2, no 1 (2009), p. 970982, doi:10.4271/2009010876.
MILLMAN, R.G., « Safety Recommendation; H-99-45 through -54 », National Transportation Safety Board (2 nov. 1999).
MOLINO, L., « Meeting with Bosch on EDR Rulemaking », National Highway Traffic Safety Administration, mémoire lié au dossier no NHTSA 20120177 (30 juillet 2014).
« Motorcoach Run-Off-the-Road Near Canon City », Colorado (21 décembre 1999), Highway Accident Brief NTSB/HAB-02/19 (Washington, DC : National Transportation Safety Board (2002).
Base de données nationale sur les collisions (BNDC)
National Highway Traffic Safety Administration. « Considerations for Regulating Installation and Performance of Heavy Vehicle Event Data Recorders (HVEDRs) », dossier no NHTSA-2007-28793 (juillet 2022).
National Highway Traffic Safety Administration. « Event Data Recorders », 49 CFR, Part 563, dossier no NHTSA-2004-18029, RIN 2127 AI72, Federal Register, vol. 69, no 113 (14 juin 2004), pp. 32932 à 32 954.
Code national de sécurité (CNS)
---. « Event Data Recorders », 49 CFR, Part 563, dossier no NHTSA-2006-25666, RIN 2127-AI72, Federal Register, vol. 71, no 166 (28 août 2006), pp. 50998 à 51 048.
---. « Event Data Recorders », 49 CFR, Parte 563, dossier no NHTSA-2012-0099, RIN 2127-AL14, Federal Register, vol. 77, no154 (9 août 2012), pp. 47552 à 47 557.
---. « Federal Motor Vehicle Safety Standards; Event Data Recorders », 49 CFR, Part 571, dossier no NHTSA-2012-0177, RIN 2127-AK86, Federal Register, vol. 77, no 240 (13 déc. 2012), pp. 74144 à 74 159.
---. « Federal Motor Vehicle Safety Standards; V2V Communications », 49 CFR, Part 571, RIN 2127-AL55, Federal Register, vol. 82, no 8 (12 janv. 2017), pp. : 3854 à 4019.
---. « Guidelines for the Safe Deployment and Operation of Automated Vehicle Safety Technologies », DOT, dossier no NHTSA-2016-0036, Federal Register, vol. 81, no 96, (18 mai 2016) pp. : 31296 à 31297.
---. Motorcoach Safety Action Plan, rapport no DOT HS 811 177, dossier no NHTSA-2007-28793, U.S. Department of Transportation (nov. 2009).
---. « NHTSA Vehicle Safety and Fuel Economy Rulemaking and Research Priority Plan 20112013 », dossier no NHTSA-2009-0108 (mars 2011).
---. « NHTSA Vehicle Safety Rulemaking and Research Priority Plan 2009-2011 », dossier no NHTSA-2009-0108 (oct. 2009).
---. « Request for Comment on Automotive Electronic Control Systems Safety and Security », dossier no NHTSA-2014-0108, Federal Register, vol. 79, no 194 (7 oct. 2014), pp. 60574 à 60583.
National Transportation Safety Board, « Highway Accident Brief », accident no HWY-00-FH011, no de rapport NTSB/HAB-02/19 (2002).
National Transportation Safety Board, « Truck-Tractor Semitrailer Rear-End Collision Into Passenger Vehicles on Interstate 44 Near Miami, Oklahoma June 26, 2009 » (HAR-10-02).
National Transportation Safety Board, Safety Recommendation H-99-053
National Transportation Safety Board, Safety Recommendation H-99-54
National Transportation Safety Board, Safety Recommendation H-10-14
National Transportation Safety Board, Safety Recommendation H-10-15
Groupe de travail de la NHTSA en matière d’EDR, « Event Data Recorders: Summary of Findings, Final Report », no NHTSA-1999-5218-9, U.S. Department of Transportation, National Highway Traffic Safety Administration (août 2001).
---. Event Data Recorders: Summary of Findings, Final Report, Volume II: Supplemental Findings for Trucks, Motocoaches, and School Buses, rapport no DOT HS 809 432, U.S. Department of Transportation, National Highway Traffic Safety Administration (mai 2002).
Office of Regulatory Analysis and Evaluation, FMVSS no 405 Event Data Recorders (EDRs), Preliminary Regulatory Evaluation, préparé pour la National Highway Traffic Safety Administration (nov. 2012).
OWINGS, R. P. « Record of the National Highway Traffic Safety Administration (NHTSA) Event Data Recorder Working Group First Meeting », préparé pour le Motor Vehicle Safety Research Advisory Committee, Crashworthiness Subcommittee, Washington D.C. (2 oct. 1998).
Sécurité routière au Canada 2020
REUST, T. « The Accuracy of Speed Captured by Commercial Vehicle Event Data Recorders »,« SAE Technical Paper 2004-01-1199 (2004).
Cours de la SAE, Accessing and Interpreting Heavy Vehicle Event Data Recorders, code cours C1022; Timothy Austin, Timothy Cheek, Matt DiSogra, Wesley Grimes, Bradley Higgins, David Plant, John Steiner, Gregory Wilcoxson
TMC RP1210A, VMRS 053, Windows Communications API, révisé en juillet 1999, © 2003 TMC/ATA.
Bureau de la sécurité des transports du Canada. « Collision à un passage à niveau, train de voyageurs no 51 de VIA Rail Canada Inc., autobus à 2 étages no 8017 d’OC Transpo, Point milliaire 3,30, subdivision de Smiths Falls, Ottawa (Ontario), 18 septembre 2013 », rapport d’enquête ferroviaire no R13T0192 (2015).
Congrès des États-Unis, H.R. 22 cité comme la « Fixing America’s Surface Transportation Act » (129 STAT. 1312 PUBLIC LAW 11494), 114e Congrès, Washington DC, déc. 2015.
17.0 Avis de non-responsabilité
Le présent rapport a été produit par Mecanica Scientific Services Corporation (Mecanica) dans le cadre d’un contrat conclu avec Transports Canada. Elle a déployé tous les efforts possibles pour garantir que le contenu présenté dans ce rapport soit pertinent, précis et à jour. Mecanica ne saurait être tenue responsable de toute erreur, omission ou dépendance quant au contenu, en tout ou en partie, dans un autre contexte.
Les renseignements et les opinions présentés dans le présent rapport sont ceux du ou des auteurs et ne reflètent pas nécessairement l’opinion officielle de Mecanica. Cette dernière ne peut garantir l’exactitude des données figurant dans la présente étude. Ni Mecanica ni aucune personne agissant en son nom ne saurait être tenue responsable de l’utilisation qui pourrait être faite des renseignements contenus dans le présent document.