
Objet : Certification de surveillance dépendante automatique en mode diffusion (ADS-B)
| Bureau émetteur : | Aviation civile, Direction des normes |
|---|---|
| Numéro de document : | CI 500-029 |
| Numéro de classification du dossier : | Z 5000-34 |
| Numéro d’édition : | 02 |
| Numéro du SGDDI : | 19872945 – V9 |
| Date d’entrée en vigueur : | 2024-01-04 |
Table des matières
- 1.0 Introduction
- 2.0 Références et exigences
- 3.0 Contexte
- 4.0 Documentation nécessaire
- 5.0 Directives d’installation du système ADS-B Émission
- 5.1 Directives générales sur l’installation
- 5.2 Équipement ADS-B
- 5.3 Source de position
- 5.4 Source d’altitude barométrique
- 5.5 Source de cap
- 5.6 Source TCAS
- 5.7 Interface pilote
- 5.8 Interface antenne ADS-B
- 5.9 Source de taux vertical
- 5.10 Considérations air-sol
- 5.11 Exigences relatives à l’espace aérien étranger
- 6.0 Moyens de conformité
- 7.0 Historique du document
- 8.0 Communiquez avec nous
- Annexe A - Description des éléments de message
- Annexe B - Identification et qualification des sources de positions ADS-B
- Annexe C - Analyse de latence
- Annexe D - Comparaison des paramètres ADS-B Émission TCAC/FAA/AESA
- Annexe E - Comparaison entre la CI 500-029, édition 2, de TCAC et l’AC 20-165B de la FAA
1.0 Introduction
1) La présente Circulaire d’information (CI) vise à fournir des renseignements et des conseils. Elle décrit un moyen acceptable, parmi d’autres, de démontrer la conformité à la réglementation et aux normes en vigueur. Elle ne peut en elle-même ni modifier, ni créer une exigence réglementaire, ni peut-elle autoriser de changements ou de dérogations aux exigences réglementaires, ni établir de normes minimales.
1.1 But
1) Cette CI fournit des directives pour l’installation initiale et l’approbation de navigabilité aérienne de l’équipement de surveillance dépendante automatique en mode diffusion (ADS-B) Émission dans les aéronefs.
2) Cette CI est principalement destinée aux installations conformes à la section 551.103 du chapitre 551 du Manuel de navigabilité (MN). La conformité à la navigabilité sera évaluée selon la règle de fonction prévue applicable (notamment, les sous-chapitres 523.2505, 525.1301, 527.1301 ou 529.1301), reconnaissant que la fonction prévue est de satisfaire aux exigences en matière d’équipements de la section 551.103 du chapitre 551 du MN). Il est possible d’obtenir une approbation de navigabilité pour votre système ADS-B Émission avec une fonction prévue différente; cependant, nous décourageons fortement ce type d’installation à moins qu’elle ne soit conforme aux critères pour l’ADS-B Émission dans l’espace aérien non radar étranger (par exemple, les spécifications de certification (et les moyens acceptables de conformité) de l’Agence de l'union européenne de la sécurité aérienne (AESA) pour la communication, la navigation et la surveillance aéroportées (CS ACNS) CS-ACNS.D.ADSB ou au titre 14, États-Unis (États-Unis) Code of Federal Regulations (CFR) -- 14 CFR §§ 91.225 et 91.227 de la Federal Aviation Administration (FAA)). Les demandeurs qui utilisent cette CI pour installer des systèmes ADS-B qui ne sont pas conformes à la section 551.103 du chapitre 551 du MN doivent respecter tous les aspects de cette CI ou proposer d’autres moyens, selon le cas, à Transports Canada Aviation Civile (TCAC).
1.2 Applicabilité
1) Le présent document s’applique à tout le personnel de TCAC, ainsi qu’aux particuliers et aux organismes qui font usage des avantages qui leur sont accordés en vertu d’une délégation externe de pouvoirs ministériels. Ces renseignements sont également accessibles à toute personne de l’industrie aéronautique, à titre d’information.
1.3 Description des modifications
1) Il s’agit d’une révision majeure de l’édition 1 de ce document, compte tenu du mandat lié à l’ADS-B Émission introduit par la modification 551-7 du chapitre 551 du MN. Elle comprend ce qui suit :
- a) nouvelle section décrivant la documentation nécessaire;
- b) nouvelle section décrivant les directives d’installation du système ADS-B Émission; et
- c) la section sur les moyens de conformité révisée pour inclure les essais de masse, d’antenne et de bout en bout.
2.0 Références et exigences
2.1 Documents de référence
1) Les documents de référence suivants sont destinés à être utilisés conjointement avec le présent document :
- a) Sous-partie 21 de la Partie V du Règlement de l’aviation canadien (RAC) - Approbation de la conception de type ou d’une modification de la conception de type d’un produit aéronautique, 1er décembre 2009.
- b) Circulaire d’information (CI) 513-003, Essais en vol nécessaires à l’approbation de la conception de modifications apportées à un aéronef Édition 01, 1er décembre 2004.
- c) CI 700-009, Surveillance dépendante automatique en mode diffusion Édition 03, 2 juillet 2021.
- d) AC 20-165B, Airworthiness Approval of Automatic Dependent Surveillance- Broadcast OUT Systems de la FAA, en date du 7 décembre 2015.
- e) AESA CS-ACNS. Certification Specifications (and Acceptable Means of Compliance) for Airborne Communication, Navigation and Surveillance (CS-ACNS), 17 décembre 2013.
- f) AESA AMC 20-24. Certification Considerations for the Enhanced ATS in Non-Radar Areas using ADS-B Surveillance (ADS-B-NRA) Application via 1090 MHz Extended Squitter, 25 avril 2008.
- g) TSO-C166b. Extended Squitter Automatic Dependent Surveillance – Broadcast (ADS-B) and Traffic Information Service – Broadcast (TIS-B) Equipment Operating on the Radio Frequency 1090 Megahertz (MHz), 2 décembre 2009.
- h) TSO-C195b. Avionics Supporting Automatic Surveillance – Broadcast (ADS-B) Aircraft Surveillance Applications (ASA), 29 septembre 2014.
- i) RTCA/DO-260B. Minimum Operational Performance Standards for 1090 MHz Extended Squitter Automatic Dependent Surveillance-Broadcast (ADS-B) and Traffic Information Services-Broadcast (TIS-B), Section 2, 2 décembre 2009.
- j) Manuel des espaces aériens désignés (TP 1820F), Édition de référence 303, en vigueur le 10 août 2023
- k) Lettre de politique de la FAA PL-105 Rev 4 MMEL Policy Letter - Accès Web à l’adresse suivante https://drs.faa.gov/browse/excelExternalWindow/DRSDOCID182159191520230120192510.0001
- l) AC 25.1322-1, Flight crew Alerting de la FAA
- m) AC 27-1B, Certification of Normal Category Rotorcraft de la FAA
- n) AC 29-2C, Certification of Transport Category Rotorcraft de la FAA
- o) AC 20-172(), Airworthiness Approval for ADS-B In Systems and Applications de la FAA
2.2 Documents annulés
1) Par défaut, il est entendu que la publication d’une nouvelle édition d’un document annule automatiquement toutes les éditions antérieures de ce même document.
2.3 Définitions et abréviations
1) Les définitions suivantes s’appliquent aux fins du présent document :
- a) ADS-B Émission: Transmission de la position, de l’altitude, de la vitesse et d’autres informations d’un aéronef à d’autres aéronefs et aux systèmes de surveillance ATC au sol;
- b) ADS-B Réception: Réception, traitement et affichage des transmissions ADS-B d’autres aéronefs. ADS-B Réception est nécessaire pour utiliser les applications aéroportées;
- c) Assurance de la conception du système (SDA) : La condition de défaillance que la chaîne de transmission de position est conçue pour prendre en charge. Le Tableau 1 fournit une liste des valeurs SDA possibles. Une SDA de 2 ou plus est requise selon la section 551.103 du chapitre 551 du MN. Consultez le paragraphe 8.053)b) de l’annexe A pour de plus amples renseignements;
Tableau 1 - Codage SDA Valeur
Probabilité d’une défaillance non détectée entraînant la transmission d’informations fausses ou trompeuses
0
1x10-3 ou inconnu
1
≤ 1x10-3
2
≤ 1x10-5
3
≤ 1x10-7
- d) Catégorie de précision de navigation pour la position (NACP) : Utilisée pour indiquer, avec une certitude de 95 %, la précision de la position horizontale signalée par l’aéronef. Le Tableau 2 fournit une liste des valeurs possibles de NACP. Une NACP de 8 ou plus est requise selon la section 551.103 du chapitre 551 du MN;
Tableau 2 - Codage NACP Valeur Limite de précision horizontale (incertitude de la position estimée)
0
EPU ≥ 18,52 km (10,0 nm)
1
EPU < 18,52 km (10,0 nm)
2
EPU < 7,408 km (4,0 nm)
3
EPU < 3,704 km (2,0 nm)
4
EPU < 1,852 m (1,0 nm)
5
EPU < 926 m (0,5 nm)
6
EPU < 555,6 m (0,3 nm)
7
EPU < 185,2 m (0,1 nm)
8
EPU < 92,6 m (0,05 nm)
9
EPU < 30 m
10
EPU < 10 m
11
EPU < 3 m
- e) Catégorie de précision de navigation pour la vitesse (NACV) :Utilisée pour indiquer, avec une certitude de 95 %, la précision de la vitesse horizontale signalée par l’aéronef. Le Tableau 3 fournit une liste des valeurs possibles de NACV. Une NACV de 1 ou plus est requise selon la section 551.103 du chapitre 551 du MN.
Tableau 3 - Valeurs NACV Valeur Limite de précision horizontale (incertitude de la position estimée)
0
≥ 10 m/s ou inconnu
1
< 10 m/s
2
< 3 m/s
3
< 1 m/s
4
< 0,3 m/s
- f) Code d’intégrité de l’altitude barométrique (NICBARO) : Indique si l’altitude-pression est fournie par un seul codeur Gillham ou par une autre source d’altitude plus robuste. En raison du risque d’erreur non détectée dans un encodage Gillham, de nombreuses installations d’encodeur Gillham font l’objet d’un contrôle croisé avec une deuxième source d’altitude. NICBARO annote l’état de cette vérification croisée;
- g) Catégorie d’intégrité de navigation (NIC) : Un paramètre qui précise un rayon de confinement de l’intégrité. Le Tableau 4 fournit une liste des valeurs NIC possibles. Une NIC de 7 ou plus est requise selon la section 551.103 du chapitre 551 du MN;
Tableau 4 - Codage NIC Valeur Rayon de confinement
0
inconnue
1
RC < 37,04 km (20,0 nm)
2
RC < 14,816 km (8,0 nm)
3
RC < 7,408 km (4,0 nm)
4
RC < 3,704 km (2,0 nm)
5
RC < 1,852 km (1,0 nm)
6 Sup A=1 Sup B=1
RC < 1,111 km (0,6 nm)
6 Sup A=0 Sup B=0
RC < 926 m (0,5 nm)
6 Sup A=0 Sup B=1
RC < 555,6m (0,3 nm)
7
RC < 370,4 m (0,2 nm)
8
RC < 185,2 m (0,1 nm)
9
RC < 75 m
10
RC < 25 m
11
RC < 7,5 m
- h) Contrôle autonome de l’intégrité par le récepteur (RAIM) : Tout algorithme qui vérifie l’intégrité de la position émise à l’aide de mesures GPS ou de mesures GPS et d’une aide barométrique est considéré comme un algorithme RAIM. Un algorithme qui utilise des informations supplémentaires (telles qu’un système multi-capteurs avec système de référence inertiel) pour vérifier l’intégrité de la sortie de position peut être acceptable en tant qu’équivalent RAIM. Dans la présente CI, le terme RAIM est synonyme de système de renforcement (ABAS) et est utilisé pour désigner à la fois le RAIM et les algorithmes équivalents au RAIM;
- i) Détection des défaillances au niveau de la protection horizontale (HPLFD) : Le rayon d’un cercle dans le plan horizontal, dont le centre se trouve à la position réelle, qui décrit la région assurée de contenir la position horizontale indiquée. La HPLFD est une région horizontale où les exigences en matière d’alertes manquées et de fausses alertes sont satisfaites pour l’ensemble choisi de satellites lorsque la détection autonome des défaillances est utilisée. C’est une fonction de la géométrie du satellite et de l’utilisateur et des caractéristiques d’erreur attendues; elle n’est pas affectée par les mesures réelles. Sa valeur est prévisible compte tenu d’hypothèses raisonnables concernant les caractéristiques d’erreur attendues;
- j) Disponibilité sélective (SA) : Technique de protection employée par le ministère de la Défense qui a réduit la précision du GPS. La disponibilité sélective a été supprimée le 1er mai 2000;
- k) Facteur de mérite horizontal (HFOM) : Le rayon d’un cercle dans le plan horizontal, dont le centre se trouve à la position vraie, qui décrit la région assurée de contenir la position horizontale indiquée avec une probabilité d’au moins 95 % dans des conditions exemptes de défauts à l’heure d’applicabilité;
- l) Galileo : Système européen de radionavigation par satellite en cours de développement qui fournira un service de positionnement mondial;
- m) Heure d’applicabilité du GNSS : Heure à laquelle la sortie de position du capteur GNSS s’applique;
- n) Heure de mesure du GNSS (TOM) : Heure à laquelle le dernier signal GNSS utilisé pour déterminer la position arrive à l’antenne GNSS de l’aéronef;
- o) Latence non compensée : Toute latence dans le système ADS-B qui n’est pas compensée par extrapolation. La latence non compensée peut être représentée comme la différence entre le moment où la position de diffusion est applicable et le moment réel de la transmission;
- p) Latence totale : Temps total entre le moment où la position est mesurée par la source de position : temp de la mesure (TOM) pour les systèmes GNSS, et le moment où la position est transmise par l’aéronef : heure de transmission ADS-B;
- q) Manuel de vol : Terme générique utilisé dans la présente CI pour représenter l’AFM, le RFM, le supplément de l’AFM ou le supplément du RFM;
- r) Navigation de surface (RNAV) : Une méthode de navigation qui permet un vol aérien sur toute trajectoire dans la zone de couverture des aides à la navigation situées dans une station au sol ou dans les limites d’un système de navigation autonome, ou une combinaison des deux;
- s) Niveau de protection horizontal sans défaillance (HPLFF) : Un niveau de protection horizontal exempt de défaillances. Voir RTCA/DO-229D, annexe R;
- t) Niveau d’intégrité de source (SIL) : Probabilité que la position horizontale signalée dépasse le rayon de confinement défini par la NIC sans déclencher d’alerte, en supposant que l’avionique ne présente aucune défaillance. Le Tableau 5 fournit une liste des valeurs SIL possibles. Un SIL de 3 est requis selon la section 551.103 du chapitre 551 du MN;
Tableau 5 - Codage SIL Valeur Probabilité
0
> 1x10-3 ou inconnu
1
≤ 1x10-3
2
≤ 1x10-5
3
≤ 1x10-7
- u) Panneau de commande de mode (MCP) : Présente des commandes qui permettent à l’équipage de créer une interface avec le système de pilotage automatique. Le MCP peut être utilisé pour demander au pilote automatique d’effectuer des tâches telles que : maintenir une altitude spécifique, changer d’altitude à une vitesse spécifique, maintenir un cap spécifique, virer à un nouveau cap, ou suivre les instructions d’un calculateur de gestion de vol. Le MCP n’est pas le pilote automatique, il contrôle simplement le mode de fonctionnement du pilote automatique;
- v) Service d’information sur le trafic - Diffusion (TIS-B) : Le TIS-B est un service de diffusion au sol fourni par un réseau de systèmes ADS-B au sol sur les liaisons d’accès universel (UAT et 1090ES qui fournit la position, la vitesse et d’autres informations sur le trafic détectées par un radar de surveillance secondaire, mais qui ne transmet pas de position ADS-B;
- w) Source de position : L’équipement avionique embarqué qui fournit la latitude, la longitude, l’altitude géométrique, la vitesse, les mesures de précision de la position et de la vitesse, et la mesure d’intégrité de la position. En outre, la source de position peut fournir les paramètres de taux vertical;
- x) Surveillance dépendante automatique en mode diffusion (ADS-B): Technologie de surveillance avancée grâce à laquelle les aéronefs équipés du système ADS-B Diffusion partagent leur position, leur altitude, leur vitesse et d’autres informations avec l’ATC et d’autres aéronefs équipés de manière appropriée;
- y) Surveillance dépendante automatique en mode rediffusion (ADS-R): Retransmission des messages ADS-B EAU des aéronefs sur la liaison 1090ES et des messages 1090ES sur la liaison d’accès universel (UAT). L’ADS-R garantit que les aéronefs équipés de liaisons différentes peuvent recevoir des messages les uns des autres lorsqu’ils sont équipés de l’ADS-B Réception;
- z) Système de renforcement à couverture étendue (WAAS) : La mise en œuvre du SBAS aux États-Unis;
- aa) Système de renforcement satellitaire (SBAS) : Un système de renforcement à couverture étendue grâce auquel l’utilisateur reçoit les informations de renforcement à partir d’un émetteur satellite. Aux États-Unis, ce système est appelé Wide Area Augmentation System (WAAS);
- bb) Système de surveillance du trafic et d’évitement des collisions (TCAS) : Systèmes d’évitement des collisions qui s’appuient sur les interrogations et les réponses des transpondeurs des autres aéronefs en vol;
- cc) Système de surveillance du trafic et d’évitement des collisions I : Le TCAS I est la première génération de technologie d’évitement des collisions. Les systèmes TCAS I sont capables de surveiller la situation du trafic autour d’un aéronef et de fournir des informations sur le relèvement et l’altitude approximatifs des autres aéronefs. Il peut également générer des avertissements de collision sous la forme d’un « avis de trafic » (TA). Le TA avertit le pilote qu’un autre aéronef se trouve à proximité, en annonçant « Trafic, trafic », mais ne propose aucune solution;
- dd) Système de surveillance du trafic et d’évitement des collisions II : Le TCAS II est la deuxième et actuelle génération de TCAS d’alerte aux instruments. Il offre tous les avantages du TCAS I, mais propose également au pilote des instructions vocales directes pour éviter le danger appelées « avis de résolution » (RA). Les systèmes TCAS II coordonnent leurs avis de résolution avant d’émettre des commandes aux pilotes, de sorte que si un avion reçoit l’instruction de descendre, l’autre recevra généralement l’instruction de monter, ce qui maximise l’espacement entre les deux avions;
- ee) Système d’information de vol - Diffusion (FIS-B) : Un service de diffusion au sol fourni sur la liaison de données UAT. Le système FIS-B de la FAA fournit aux pilotes et aux équipages d’aéronefs correctement équipés certaines informations météorologiques et aéronautiques à l’aide d’un affichage dans le cockpit;
- ff) Système mondial de navigation par satellite (GNSS) : Terme générique désignant un système de navigation par satellite, tel que le GPS, qui fournit un positionnement géospatial autonome à l’échelle mondiale et peut inclure des extensions locales ou régionales; et
- gg) Système mondial de localisation (GPS) : Système américain de radionavigation par satellite qui fournit un service de positionnement mondial. Le service fourni par GPS à des fins civiles est défini dans la norme de rendement du service de positionnement normalisé du système mondial de localisation (Global Positioning System Standard Positioning Service Performance Standard), 4e édition, datée de septembre 2008, disponible à l’adresse http://www.gps.gov/technical/ps/2008-SPS-performance-standard.pdf (en anglais seulement).
2) Les abréviations suivantes sont utilisées dans le présent document :
- a) 1090ES : Squitter long à 1090 MHz;
- b) 14 CFR : Titre 14 du Code of Federal Regulations;
- c) ACO : Bureau de certification des aéronefs;
- d) ADIRS : Système de référence inertielle anémobarométrique;
- e) ADIRU : Centrale inertielle de référence anémobarométrique;
- f) ADS-B : Surveillance dépendante automatique en mode diffusion;
- g) ADS-R : Surveillance dépendante automatique en mode rediffusion;
- h) AESA : Agence de l’union européenne de la sécurité aérienne;
- i) ARINC : Aeronautical Radio, Inc.;
- j) ASA : Applications de surveillance des aéronefs;
- k) ASDE-X : Radar de surveillance des mouvements de surface, modèle X;
- l) ATCRBS : Air Traffic Control Radar Beacon System;
- m) CCA : Contrôle de la circulation aérienne;
- n) CEM : Compatibilité électromagnétique;
- o) CFR : Code of Federal Regulations;
- p) CI : Circulaire d’information;
- q) CS : Certification Standards;
- r) CS-ACNS : Certification Specifications (and Acceptable Means of Compliance) for Airborne Communication, Navigation and Surveillance;
- s) CT : Certificat de type;
- t) dB : Décibel;
- u) DAPR : Rapport détaillé sur les performances de l’ADS-B;
- v) DME : Équipement de mesure de distance;
- w) É.-U. : États-Unis d’Amérique;
- x) EPU : Incertitude de la position estimée;
- y) ERF : Évaluation du risque fonctionnel;
- z) ERP : Puissance apparente rayonnée;
- aa) FAA : Federal Aviation Administration;
- bb) FCU : Poste de commande;
- cc) FIS-B : Services d’information de vol en mode diffusion;
- dd) FMS : Système de gestion de vol;
- ee) FSNA : Fournisseur de services de navigation aérienne;
- ff) GB : Au sol;
- gg) GBAS : Système de renforcement au sol;
- hh) GNSS : Système mondial de navigation par satellite;
- ii) GNSS/IRS : Système mondial de navigation par satellite/système de référence inertielle;
- jj) GPS : Système mondial de localisation;
- kk) GVA : Précision géométrique verticale;
- ll) HAE : Hauteur au-dessus de l’ellipsoïde;
- mm) HAG : Hauteur au-dessus du géoïde;
- nn) HFOM : Facteur de mérite horizontal;
- oo) HIL : Niveau d’intégrité horizontal;
- pp) HPL : Niveau de protection horizontal;
- qq) HUL : Niveau d’incertitude horizontal;
- rr) Hz : Hertz;
- ss) ID du vol : Identification du vol;
- tt) IEM : Interférence électromagnétique;
- uu) IFR : Règles de vol aux instruments;
- vv) IMN : Instructions de maintien de la navigabilité;
- ww) INS : Système de navigation par inertie;
- xx) IRS : Système de référence par inertie;
- yy) IRU : Centrale inertielle de référence;
- zz) kt : Nœuds;
- aaa) LPV : Précision latérale avec guidage vertical;
- bbb) m/s : Mètres par seconde;
- ccc) MC : Moyens de conformité;
- ddd) MCP : Panneau de commande de mode;
- eee) MEAD : Manuel des espaces aériens désignés;
- fff) MHz : Mégahertz;
- ggg) MMR : Récepteur multimode;
- hhh) MN : Manuel de navigabilité;
- iii) MOPS : Normes de performances opérationnelles minimales;
- jjj) Ms : Millisecondes;
- kkk) MVA : Manuel de vol d’aéronefs;
- lll) NACP : Catégorie de précision de la navigation pour la position;
- mmm) NACV : Catégorie de précision de la navigation pour la vitesse;
- nnn) NAS : Système d’espace aérien national;
- ooo) NIC : Catégorie d’intégrité de la navigation;
- ppp) NICbaro : Code d’intégrité de l’altitude barométrique;
- qqq) NM : Mille marin;
- rrr) NMM : Niveau moyen de la mer;
- sss) NRA : Espace sans radar;
- ttt) OACI : Organisation de l’aviation civile internationale;
- uuu) PAR : Puissance apparente rayonnée;
- vvv) PFD : Écran principal de vol;
- www) POA : Décalage de position appliqué;
- xxx) PRA : Pratique recommandée dans l’aérospatiale;
- yyy) PU : Probabilité de mise à jour;
- zzz) PUI : Probabilité d’intervalle de mise à jour;
- aaaa) RA : Avis de résolution;
- bbbb) RAC : Règlement de l’aviation canadien;
- cccc) RAI : Répertoire des aéroports et installations;
- dddd) RAIM : Contrôle autonome de l’intégrité par le récepteur;
- eeee) RC : Rayon de confinement;
- ffff) RCA : Rapport de conformité de l’exploitation des aéronefs ADS-B;
- gggg) RFM : Manuel de vol de giravions;
- hhhh) RFMS : Supplément au manuel de vol de giravions;
- iiii) RTCA : Radio Technical Commission for Aeronautics;
- jjjj) RVSM : Minimum d’espacement vertical réduit;
- kkkk) SA : Disponibilité sélective;
- llll) SB : Spatial;
- mmmm) SBAS : Système de renforcement satellitaire;
- nnnn) SDA : Assurance de la conception des systèmes;
- oooo) SIL : Niveau d’intégrité de source;
- pppp) SILSUPP : Supplément SIL;
- qqqq) SIS : Signaux dans l’espace;
- rrrr) SMVA : Supplément du Manuel de vol d’aéronefs;
- ssss) SSR : Radar secondaire de surveillance;
- tttt) STC : Certificat de type supplémentaire;
- uuuu) TCAC : Aviation civile de Transports Canada;
- vvvv) TCAS : Système de surveillance de trafic et d’évitement d’abordage;
- wwww) TCAS I : Système de surveillance de trafic et d’évitement d’abordage (génération 1);
- xxxx) TCAS II : Système de surveillance de trafic et d’évitement d’abordage (génération 2);
- yyyy) TIS-B : Service d’information sur le trafic – Diffusion;
- zzzz) TOM : Heure de la mesure;
- aaaaa) TSO : Instruction technique normalisée;
- bbbbb) TSOA : Autorisation d’instruction technique normalisée;
- ccccc) UAT : Émetteur-récepteur d’accès universel;
- ddddd) UTC : Temps universel coordonné;
- eeeee) VAPP : Vitesse d’approche cible;
- fffff) VFE : Vitesse maximale volets sortis;
- ggggg) VFOM : Facteur de mérite vertical;
- hhhhh) VFR : Règles de vol à vue;
- iiiii) VH : Vitesse maximale de vol en palier à la puissance maximale continue;
- jjjjj) VMO : Vitesse maximale admissible en exploitation;
- kkkkk) VNE : Vitesse à ne pas dépasser;
- lllll) VOR : Radiophare omnidirectionnel VHF;
- mmmmm) VS : Vitesse de décrochage ou vitesse minimale de vol stabilisé à laquelle l’avion peut être contrôlé;
- nnnnn) VY : Vitesse pour obtenir le meilleur taux de montée;
- ooooo) WAAS : Système de renforcement à couverture étendue; et
- ppppp) WGS-84 : Système géodésique mondial 1984.
3.0 Contexte
1) L’ADS-B est un système de surveillance en mode diffusion par liaison de données. Il est automatique et envoie périodiquement des informations sur l’aéronef sans interrogation externe. Un système ADS-B fournit des fonctions de surveillance basées sur les performances pour aider ou remplacer la surveillance par radar au sol. L’ADS-B permet aux agences de gestion du trafic aérien et aux autres aéronefs équipés de manière appropriée de surveiller la position des aéronefs équipés de l’ADS-B Émission. Les récepteurs ADS-B basés dans l’espace augmentent la couverture ADS-B, y compris dans les zones reculées où les récepteurs ADS-B terrestres ne sont pas accessibles ou sont hors de la visibilité directe. La Figure 1 ci-dessous présente une vue d’ensemble du fonctionnement d’un système ADS-B d’aéronef.
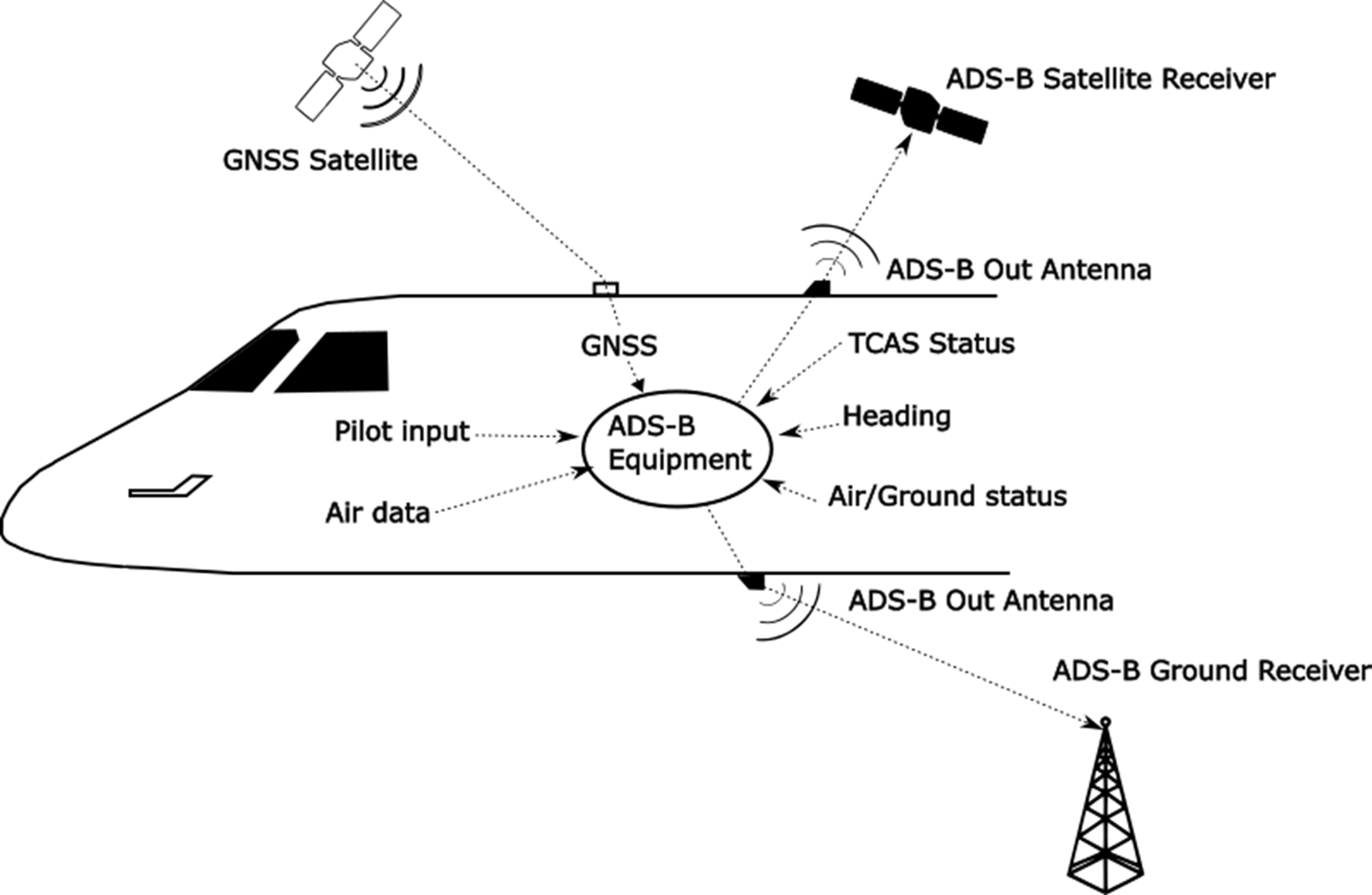
Figure 1 - Vue d’ensemble du fonctionnement du système ADS-B Émission
2) Un système ADS-B Émission type comprend l’équipement ADS-B, une source de position, une source d’altitude barométrique, une source d’état air-sol, une source du système d’avertissement de surveillance de trafic et d’évitement d’abordage (TCAS) II si l’aéronef est équipé du TCAS II, une source de cap optionnelle, ainsi que toutes les antennes et tous les affichages associés.
3.1 ADS-B Émission
1) Avec l’introduction de la modification 551-7 du MN 551, le premier élément des exigences de performance de l’ADS-B Émission proposées par le Canada a été mis en place, introduisant des normes de conception et d’installation pour les équipements compatibles avec le système ADS-B Émission. Les normes canadiennes de performance relatives au système ADS-B Émission sont uniques en ce sens qu’elles exigent que l’équipement ADS-B Émission transmette à la fois vers des récepteurs terrestres et spatiaux.
2) L’Agence européenne de la sécurité aérienne a établi les exigences d’interopérabilité qui permettent aux services de la circulation aérienne d’être fournis au niveau international et, en 2013, les Certification Specifications for Airborne Communication, Navigation and Surveillance ont introduit des exigences ADS-B Émission plus complètes et mises à jour pour les espaces aériens contrôlés, y compris l’assurance de la conception des systèmes (SDA), que TCAC considère comme essentielle, voir le paragraphe 5.1 (6) de cette CI.
3) La FAA a publié l’AC 20-165B Airworthiness Approval of Automatic Dependent Surveillance - Broadcast Out Systems, sur laquelle est basée une grande partie de la présente CI de TCAC. Bien qu’il y ait des différences dans les exigences entre les mandats d’équipage de la FAA et de TCAC, le concept de vérification de la conformité basée sur les performances établi dans l’AC de la FAA est largement utilisé par TCAC dans la présente CI qui, comme pour les CS ACNS.D.ADSB, « est dans une large mesure conforme à l’AC correspondante de la FAA ».
4) Il incombe au demandeur de s’assurer que les aspects de certification exigés par une autorité de validation sont pris en compte. Il existe certaines différences entre les exigences de certification de la FAA et de l’AESA pour les installations ADS-B Émission, et ces différences sont énumérées dans les documents d’orientation de chaque agence. La section 6.2, Tableau 9 de cette CI énonce les messages jugés essentiels pour la certification au Canada. Une comparaison entre les messages essentiels de TCAC, de la FAA et de l’AESA en cas de demande d’exploitation dans ces espaces aériens est présentée au Tableau 23 de l’annexe D. Une comparaison de haut niveau entre la CI 500-029 Edition 2 et l'AC 20-165b de la FAA est présentée à l'Annexe E.
5) Consultez la CI 700-009 de TCAC pour connaître les exigences des exploitants aériens avec les aéronefs équipés de l’ADS-B.
3.2 Notes sur l’émetteur-récepteur d’accès universel (UAT) ADS-B Réception et ADS-B Émission
1) Les aéronefs équipés de systèmes ADS-B Réception peuvent être en mesure de recevoir des transmissions ADS-B Émission, de surveillance dépendante automatique en mode rediffusion (ADS-R), de services d’information de vol en mode diffusion (FIS-B) et de services d’information sur le trafic en mode diffusion (TIS-B), lorsqu’elles sont disponibles, afin d’améliorer la connaissance de la situation. Pour savoir comment obtenir l’approbation de l’installation de l’équipement ADS-B Réception, veuillez consulter l’AC 20-172B de la FAA, Airworthiness Approval for ADS-B In Systems and Applications (Approbation de la navigabilité pour les systèmes et applications ADS-B Réception).
2) Au Canada, les aéronefs équipés de l’ADS-B Réception pourront recevoir les données ADS-B Émission des aéronefs également équipés qui sont dans la portée optique.
3) Aux États-Unis d’Amérique (É.-U.), l’UAT est également une option pour l’équipage qui permet de respecter la règle d’exploitation de la FAA pour les opérations d’aéronefs sous une altitude de 18 000 pieds, où la bande UAT est utilisée pour fournir un certain nombre d’autres services, notamment des produits graphiques du National Weather Service, des restrictions de vol temporaires et des informations sur les espaces aériens à usage spécial via le FIS-B, ainsi que des services d’information sur le trafic via le TIS-B. Notez toutefois que ces services étendus ne sont pas disponibles au Canada.
4) Au Canada, les récepteurs ADS-B de contrôle de la circulation aérienne ne sont compatibles qu’avec l’équipement ADS-B Émission de squitter long à 1090 MHz (1090ES), qui fait l’objet de la présente CI. Les exploitants canadiens souhaitant s’équiper d’un système UAT ADS-B Émission doivent plutôt respecter l’AC 20-165B de la FAA.
4.0 Documentation nécessaire
4.1 Notes générales
1) Un système ADS-B Émission type est illustré à la Figure 1. Les demandeurs doivent indiquer tous les numéros de pièces (matériel et logiciel) des éléments qui composent le système ADS-B dans leur liste de dessins principaux afin de définir la ou les configurations à approuver. En outre, les demandeurs peuvent démontrer l’interopérabilité de plusieurs composants pour une fonction donnée. Par exemple, le demandeur peut demander l’approbation d’une source de position secondaire ou ajouter plusieurs sources de position uniques au système. Cette évaluation initiale des interconnexions de systèmes est essentielle pour déterminer les normes concernées dont la conformité devra être démontrée.
2) La documentation doit être préparée sous une forme qui peut être utilisée pour vérifier la conformité de l’installation d’un aéronef particulier en vue de l’approbation opérationnelle et pour effectuer une inspection de conformité lorsqu’une telle inspection est recommandée par les instructions d’entretien.
3) L’installation de l’ADS-B Émission ne peut pas être traitée uniquement avec la supposition d’une absence de danger. Le document DO-260(), Minimum Operational Performance Standards for 1090 MHz Extended Squitter Automatic Dependent Surveillance-Broadcast (ADS-B), définit la transmission de messages ADS-B Émission erronés destinés à être utilisés par d’autres aéronefs ou par le contrôle de la circulation aérienne pour les services de séparation comme une condition de défaillance majeure. Par conséquent, le système doit fonctionner correctement lorsqu’il est installé et doit respecter les normes minimales de performance opérationnelle applicables afin de garantir le respect des exigences d’intégrité et de précision requises. De plus, les dispositions de l’AC23.1309-1 de la FAA qui permettent de réduire les probabilités de défaillance et l’assurance de la conception pour les aéronefs de moins de 6 000 livres ne s’appliquent pas au système ADS-B Émission. L’installation de l’ADS-B doit satisfaire aux exigences de certification applicables définies dans la base de certification de type de l’aéronef et/ou dans la règle de produit modifiée (Changed Product Rule) et, à la discrétion di demandeur, suivre les instructions contenues dans les renseignements consultatives applicables pour un moyen de conformité acceptable. Les approbations sur le terrain ne sont pas disponibles au Canada et les installations de modification technique doivent être approuvées.
4) Bien que l’accent soit placé sur le jumelage de la source ADS-B et du système ADS-B, lorsque la certification par similarité est proposée, les données de conception de l’installation doivent être présentées pour justifier l’argument de similarité. Si le type d’interface de l’aéronef qui relie un système fournissant des données source de l’aéronef au système ADS-B pour une transmission ultérieure a été modifié, par exemple d’une interface ARINC 429 à une autre norme d’interface recommandée, le vol d’essai doit saisir les données qui ont été transmises par cette interface modifiée.
5) La présente CI couvre l’installation de l’équipement ADS-B Émission, les mises à jour du manuel de vol, les mises à jour des instructions de maintien de la navigabilité (IMN), les conseils pour les systèmes d’interface, les essais au sol et les essais en vol.
6) Les détails de l’installation du système doivent être spécifiques à chaque conception et le demandeur devra établir une liste de contrôle de conformité en tenant compte des normes concernées du MN applicable à l’aéronef considéré.
7) Les aéronefs homologués à la fois en vertu de la section 4 du document CS-ACNS 1090 MHz Extended Squitter ADS-B de l’AESA et paragraphes 91.225 plus 91.227 du CFR 14 de la FAA sont réputés conformes à la section 551.103 du chapitre 551 du MN.
4.2 Manuel de vol d’aéronef
1) Généralités ou procédures normales - Comprennent les limites d’exploitation et les procédures d’exploitation normales de l’ADS-B Émission, ainsi qu’une description du système dans le manuel de vol de l’aéronef (MVA), dans le manuel de vol du giravion (MVG), dans le supplément au Manuel de vol de l’aéronef (MVA) ou dans le supplément au Manuel de vol du giravion (MVG), selon le cas. Le manuel de vol doit également indiquer que l’installation satisfait aux exigences de la section 551.103 du chapitre 551 du MN. Pour ce faire, il est possible d’ajouter l’énoncé suivant à la section Généralités ou procédures normales du manuel de vol :
Il a été démontré que le système ADS-B Émission installé répond aux exigences en matière d’équipements de la section 551.103 du chapitre 551 du MN.
Remarque : Pour les aéronefs approuvés dans les conditions décrites au paragraphe 4.1(7), l'ajout de la déclaration ci-dessus à l'AFM n'est requis que si le demandeur opte pour un TC/STC canadien.
2) Limites d’exploitation - Le manuel de vol doit décrire toutes les limites d’exploitation nécessaires à la sécurité des opérations en raison de la conception, de l’installation ou des caractéristiques d’exploitation.
3) Procédures d’exploitation - Décrire les procédures d’exploitation normales et non normales du système dans le manuel de vol. Décrire les actions attendues du pilote, y compris :
- a) Comment entrer le code du mode 3/A, l’identification du vol (Flight ID), utiliser la fonction IDENT et activer ou désactiver l’état d’urgence. Si le système ADS-B et le transpondeur ne disposent pas d’un point d’entrée unique pour le code du mode 3/A, l’IDENT et l’état d’urgence, les procédures du manuel de vol doivent veiller à ce que des informations contradictoires ne soient pas transmises par le système ADS-B et le transpondeur;
- b) tous les affichages du système ADS-B Émission s’activent et fournissent des instructions au pilote sur la façon de réagir à toute condition d’erreur;
- c) comment le système ADS-B Émission peut être désactivé et comment détecter que le système a été désactivé, s’il est possible de désactiver le système ADS-B Émission autrement qu’en interrompant l’alimentation par le disjoncteur. Le manuel de vol doit traiter des effets de la désactivation du système ADS-B Émission, y compris les effets sur le transpondeur et le TCAS II, si la désactivation du système ADS-B Émission désactive également le transpondeur ou le TCAS II;
- d) des indications dans le manuel de vol sur le moment où il faut activer le système ADS-B Émission. Le système ADS-B Émission doit être activé (mis sous tension) pendant toutes les phases des opérations de vol, y compris les opérations de circulation en surface à l’aéroport. Les applications ADS-B en surface et la surveillance ATC en surface utiliseront les diffusions ADS-B Émission; il est donc important que les systèmes ADS-B Émission des aéronefs continuent à émettre en surface à l’aéroport. Cependant, l'ATC peut émettre des instructions sur des aéroports spécifiques pour maintenir le transpondeur et/ou les systèmes ADS-B en veille ;
- e) Si la fonction ADS-B Émission utilise un transpondeur mode S pour émettre, le manuel de vol, les listes de contrôle et tous les manuels de procédures de l’exploitant doivent être mis à jour en conséquence avec les conseils d’exploitation ADS-B Émission, d’autant plus que d’un point de vue historique, les transpondeurs ont été mis sous tension par l’équipage de conduite à l’arrivée sur la piste pour le décollage et mis hors tension ou en veille au moment de quitter la piste après l’atterrissage. Avec l’intégration de l’ADS-B dans un transpondeur mode S, les orientations existantes pour le fonctionnement du transpondeur doivent être mises à jour pour garantir que le système ADS-B fonctionne pendant les opérations de circulation en surface à l’aéroport, sauf indication contraire de l'ATC.
4) Description du système - Décrire le système ADS-B Émission et l’interface avec les autres systèmes de l’aéronef dans le manuel de vol. Si plusieurs sources de position sont mises en interface avec l’émetteur ADS-B, décrire le mécanisme de sélection de la source et toutes les indications correspondantes.
4.3 Instructions de maintien de la navigabilité
1) L’installation du système ADS-B doit comprendre une IMN qui répond aux exigences typiques d’une installation de système, ce qui inclut la manière d’effectuer une vérification fonctionnelle complète du système.
2) Que le système ADS-B Émission soit intégré au système de transpondeur mode S (installation type) ou non, la périodicité des essais doit être conforme à celle établie pour les transpondeurs basés sur le contrôle de la circulation aérienne, conformément à la norme 625 du RAC. Ces essais doivent comprendre l’essai du système ADS-B dans son ensemble et le fonctionnement correct de la détection des défaillances du système, conformément aux instructions du fabricant de l’équipement.
3) Le système ADS-B s’interface généralement avec de multiples composants externes, tels que des sources de position et des sources altimétriques. L’installateur doit dresser la liste de tous les numéros de pièces (matérielles et logicielles) des composants d’interfaçage dans l’IMN.
4) Pour chaque composant mis en interface, l’installateur doit procéder à une analyse des systèmes sources afin de déterminer quelles actions d’entretien sur ces systèmes sources nécessiteraient un test fonctionnel du système ADS-B afin de vérifier que chaque système fonctionne correctement. Par conséquent, l’IMN de chaque système mis en interface doit être mis à jour par un processus qui garantit le maintien de la navigabilité du système ADS-B à la suite de travaux d’entretien ou de modifications de la conception du composant mis en interface.
5) Les systèmes fournissant une entrée dédiée à la fonction ADS-B ne pouvant être vérifiée par d’autres moyens doivent être testés en tant que partie du système ADS-B dans son ensemble. Pour ces systèmes, l’installateur doit fournir des recommandations à l’exploitant pour qu’il les intègre dans son IMN. Par exemple, si l’installateur détermine que la dépose et le remplacement du récepteur du système mondial de navigation par satellite (GNSS) nécessitent une vérification fonctionnelle complète du système ADS-B parce que l’entrée GNSS dans l’ADS-B ne peut pas être vérifiée par d’autres moyens, y compris la synchronisation correcte des messages, ses instructions à l’intention de l’exploitant devraient inclure des instructions pour modifier les instructions de l’IMN concernant la dépose et le remplacement dans votre manuel d’entretien du GNSS afin d’inclure la déclaration suivante : « La dépose et le remplacement du récepteur GNSS nécessitent également une vérification fonctionnelle complète du système ADS-B conformément au manuel d’entretien XX-XX-XX, p. xxx. Notez la réalisation de ce test dans le journal de bord ».
6) Pour l’équipement de transmission d’altitude connecté au système ADS-B et les transpondeurs qui intègrent la fonctionnalité ADS-B, voir l’AC 43-6, Altitude Reporting Equipment and Transponder System Maintenance and Inspection Practices de la FAA.
7) L’installation de l’ADS-B n’affecte pas les normes de minimum d’espacement vertical réduit (RVSM). Pour les systèmes altimétriques conformes aux normes RVSM, les exigences et les tolérances énoncées dans le programme d’entretien RVSM approuvé doivent être respectées.
4.4 Listes principales d’équipement minimal (MMEL)
1) Le bon état de service de l’équipement ADS-B installé doit être noté dans la MMEL, si une MMEL est requise. TCAC a adopté la lettre d’orientation PL-105 de la FAA pour la mise en service selon la MMEL et l’intervalle de réparation.
5.0 Directives d’installation du système ADS-B Émission
5.1 Directives générales sur l’installation
1) Qualification environnementale - Il faut s’assurer que la qualification environnementale de l’équipement installé est appropriée pour l’aéronef, conformément à l’AC 21-16G, Radio Technical Commission for Aeronautics (RTCA) Document DO-160 versions D (ou plus récentes), « Environmental Conditions and Test Procedures for Airborne Equipment ».
2) Évaluation de la sécurité des systèmes - Le paramètre d’assurance de la conception du système ADS-B indique la probabilité qu’un mauvais fonctionnement du système ADS-B entraîne la transmission de renseignements trompeurs ou erronés sur la position ou sur les mesures de la qualité. Il se peut que la valeur SDA soit prédéfinie à l’installation dans le cas de systèmes qui n’emploient pas de multiples sources de position comportant des niveaux d’assurance de la conception différents. Autrement, le système doit être en mesure de modifier le paramètre de la SDA pour la diffusion, de façon à ce qu’il corresponde à celui de la source de position employée au moment de la transmission.
3) Architecture conforme - L’équipement d’ADS-B qui satisfait aux exigences de performances minimales de l’instruction technique normalisée (TSO) / TSO-C166b ou révision ultérieure et qui est directement connecté à une source de position qui satisfait aux exigences de performances minimales de toute révision des TSO suivants peut employer le paramètre « SDA = 2 » sans que d’autres analyses soient requises :
- a) TSO-C129(), Airborne Supplemental Navigation Equipment Using the Global Positioning System (GPS);
- b) TSO-C145(), Airborne Navigation Sensors Using The Global Positioning System (GPS) Augmented By The Satellite Based Augmentation System (SBAS);
- c) TSO-C146(), Stand-Alone Airborne Navigation Equipment Using The Global Positioning System (GPS) Augmented By The Satellite Based Augmentation System (SBAS); ou
- d) TSO-C196(), Airborne Supplemental Navigation Sensors for Global Positioning System Equipment using Aircraft-Based Augmentation.
4) Pour établir la SDA dans le cas des installations dans des aéronefs dont les architectures système sont plus complexes, il faut réaliser une évaluation de la sûreté du système, comme il est décrit ci-dessous. Les installations de systèmes ADS-B non certifiés doivent être réglés sur SDA = 0, avec l’exception suivante : les aéronefs admissibles à un certificat de navigabilité aérienne spécial - construction amateur en vertu du RAC 507.03(b) ou un certificat spécial de navigabilité – maintenance par le propriétaire en vertu du RAC 507.03(a) et de l'article 507.03 du MN((6), peuvent installer des équipements non approuvés et régler la valeur SDA conformément au manuel d’installation du fabricant de l’équipement, à condition que l’équipement soit accompagné d’une déclaration de conformité aux exigences de performance de la section 551.103 du chapitre 551 du MN, émanant du ou des équipementiers.
5) Réalisation de l’évaluation de la sécurité du système - Les systèmes ADS-B utilisant des sources de position non répertoriées au paragraphe 3) ci-dessus, les systèmes comportant des dispositifs intermédiaires tels que des concentrateurs de données ou les systèmes intégrés par le biais d’une architecture de bus de données hautement intégrée doivent réaliser une évaluation de la sécurité du système et régler la valeur SDA en fonction des résultats de l’évaluation. L’évaluation de la sécurité du système doit démontrer que le système installé répond à toutes les exigences de l’instruction technique normalisée TSO-C166b pour régler la SDA ≥ 2. Ceci peut être réalisé en utilisant, par exemple, les méthodes décrites dans :
- a) AC 25.1309-1(), System Design and Analysis;
- b) AC 23.1309-1(), System Safety Analysis and Assessment for Part 23 Airplanes;
- c) La pratique recommandée en matière d’aérospatiale (ARP) 4761 de la SAE International (SAE), Guidelines and Methods for Conducting the Safety Assessment Process on Civil Airborne Systems and Equipment; ou
- d) SAE ARP 4754A, Guidelines for Development of Civil Aircraft and Systems.
6) Si le système contient différents niveaux d’assurance de conception pour le matériel et le logiciel, il convient d’utiliser le niveau d’assurance de conception le plus défavorable. Par exemple, si le niveau d’assurance du matériel est C et le niveau d’assurance du logiciel est B, la valeur SDA indique que le système a été qualifié en fonction d’une condition de défaillance majeure. Si le système ADS-B est intégré à un GPS non conforme (par exemple, un GPS non conforme à l’une des instructions techniques normalisées énumérées ci-dessus), la valeur SDA doit être réglée sur « 0 ». Voir le sous-paragraphe 4) ci-dessus pour une exception.
Remarque : Comme indiqué au paragraphe 4.13), bien que les effets directs d’une panne ADS-B sur votre aéronef puissent être mineurs, les informations ADS-B Émission seront utilisées par l’ATC et par d’autres aéronefs équipés de l’ADS-B. Pour cette raison, les dispositions de la CI AC23.1309-1() qui permettent de réduire les probabilités de défaillance et l’assurance de la conception pour les aéronefs de moins de 6 000 livres ne s’appliquent pas au système ADS-B Émission.
7) Assurance de la conception des équipements existants - L’installation de l’aéronef peut utiliser certains équipements certifiés pour une utilisation avec un système de transpondeur existant. Cette évaluation de la sécurité n’a pas pour but d’inciter au remplacement des instruments altimétriques, des commandes de l’équipage de conduite, des instruments de cap ou des antennes existants. En revanche, l’installation de la source de position doit être conforme aux orientations de la présente CI, y compris les considérations relatives à l’assurance de la conception.
8) Latence de position - La latence de position est la différence entre le moment où une mesure est prise pour déterminer la position géométrique de l’aéronef et le moment où l’équipement ADS-B de l’aéronef transmet cette mesure de position. La limitation de la latence dans les systèmes ADS-B réduit les erreurs dans la position signalée. L’équipement ADS-B prévu dans TSO-C166b permet de compenser la latence en extrapolant la position sur la base des informations relatives à la vitesse. Tous les candidats doivent démontrer qu’ils respectent les exigences en matière de latence énoncées à la section 5.19). Pour ce faire, ils peuvent s’équiper d’une architecture conforme, telle que celle énumérée à la section 5.110), ou effectuer une analyse telle que celle décrite à la section 5.111). Les termes relatifs à la latence sont définis plus en détail dans l’annexe C de la présente CI.
Remarque : Pour démontrer la conformité avec la section 551.103 du chapitre 551 du MN, vous devez calculer la latence à partir de l’heure de mesure de la source de position. Ne calculez pas la latence à partir de l’heure d’applicabilité de la source de position, tel que défini dans le document (DO)-260B de la RTCA Minimum Operational Performance Standards for 1090 MHz Extended Squitter Automatic Dependent Surveillance - Broadcast (ADS-B) and Traffic Information Services - Broadcast (TIS-B), avec le rectificatif 1, ou révision ultérieure.
9) Exigences de latence de position - Deux exigences de latence de position sont associées à l’ADS-B Émission :
- a) Latence totale : La latence totale est définie comme la différence entre le moment où la position est mesurée et celui où elle est transmise par l’aéronef. Pour satisfaire à la section 551.103 du chapitre 551 du MN, la latence totale doit être inférieure ou égale à 2,0 secondes.
- b) Latence non compensée : La latence non compensée est la différence entre l’heure d’applicabilité de la position transmise et l’heure réelle à laquelle la position est transmise par le système ADS-B. Pour satisfaire à la section 551.103 du chapitre 551 du MN, la latence non compensée doit être inférieure ou égale à 0,6 secondes. L’aéronef doit compenser toute latence supérieure à 0,6 seconde, mais ne doit pas surcompenser (c’est-à-dire devancer la position de l’aéronef) de plus de 0,2 seconde.
- Remarque : Le comité spécial 186 de la RTCA, qui a élaboré les normes minimales de performance opérationnelle (MOPS) de l’ADS-B Émission, recommande que les systèmes ADS-B Émission transmettent les informations de position avec un temps de latence non compensé inférieur ou égal à 0,4 seconde. Cette recommandation vise à soutenir les futures applications ADS-B Réception. Toutefois, nous vous encourageons à réduire, autant que possible, la latence non compensée dans votre installation. Des recommandations pour minimiser le temps de latence sont incluses dans l’annexe C de la présente CI.
10) Architecture conforme aux exigences de latence - Les systèmes ADS-B directement connectés à une source de position répondant aux exigences minimales de performance de toute révision de la TSO-C145, de la TSO-C146 ou de la TSO-C196 avec l’équipement ADS-B répondant aux exigences minimales de performance de la TSO-C166b ou révision ultérieure satisfont aux exigences de latence totale et de latence non compensée. Les systèmes dotés d’une architecture conforme n’ont pas besoin d’effectuer une analyse de latence de position et de vitesse.
11) Analyse de latence de position - Si vous installez un système ADS-B dont l’architecture n’est pas conforme, comme décrit ci-dessus, vous devez effectuer une analyse de latence pour démontrer que le système ADS-B installé répond aux exigences de latence totale et de latence non compensée. Les systèmes intégrés par le biais d’une architecture de bus de données hautement intégrée doivent compléter l’analyse de latence. L’annexe C de la présente CI propose une méthode acceptable pour réaliser cette analyse.
12) Latence de la mesure d’intégrité - Les sources de position du système mondial de navigation par satellite (GNSS) peuvent retarder la mise à jour du rayon de confinement de l’intégrité lorsqu’elles tentent de détecter et d’exclure les satellites défectueux. La section 551.103 du chapitre 551 du MN autorise un délai de 12 secondes pour que le système ADS-B transmette un changement de catégorie d’intégrité de navigation (NIC). Cette tolérance de 12 secondes est disponible pour toute source de position, et pas seulement pour les sources de position du GNSS. Les 12 secondes comprennent à la fois le temps nécessaire à la source de position pour détecter le défaut et le temps nécessaire au système ADS-B pour transmettre l’indication de défaut. L’obligation d’indiquer un changement de NIC s’applique à la période comprise entre la première transmission d’une position en défaut et la transmission de la NIC mise à jour indiquant le défaut. Le temps total de mise à jour du NIC est basé sur l’effet cumulé (1) du temps de détection et d’exclusion du défaut de la source de position et (2) de la différence de transmission asynchrone la plus défavorable entre le moment où la position en défaut est transmise et le moment où le NIC indiquant le défaut est transmis.
13) Architecture conforme aux exigences de latence d’intégrité - Les équipements ADS-B répondant aux exigences minimales de performance de l’instruction technique normalisée TSO-C166b qui sont directement connectés à une source de position répondant aux exigences minimales de performance de toute révision de l’instruction technique normalisée TSO-C145, TSO-C146 ou TSO-C196 répondent généralement aux exigences de latence d’intégrité. Pour ces systèmes, il suffit de démontrer, par une analyse, qu’une défaillance d’un satellite GNSS non isolé détectée par la source de position est correctement transmise à l’équipement ADS-B et que l’équipement ADS-B indique une position non valide en transmettant les mesures d’intégrité et de précision de la position égales à zéro.
Remarque : La caractéristique ARINC 743A-5, GNSS Sensor, permet une certaine souplesse dans la manière dont les informations sont transférées en cas de défaillance d’un satellite GNSS; il est donc nécessaire de s’assurer qu’une défaillance d’un satellite non isolé entraîne l’indication d’une position non valide par l’ADS-B.
14) Analyse de latence de la mesure d’intégrité - Si vous installez un système ADS-B sans architecture conforme comme décrit ci-dessus, vous devez effectuer une analyse de latence pour démontrer que le système ADS-B répond aux exigences de latence de la mesure d’intégrité. L’analyse de latence doit inclure le temps maximum nécessaire à une source de position pour indiquer un défaut d’intégrité, tout délai ajouté par un dispositif intermédiaire tel qu’un concentrateur de données, et le délai ajouté par l’équipement ADS-B.
15) Assurance de la conception du système (SDA) et niveau d’intégrité de la source (SIL) - La section 551.103 du chapitre 551 du MN exige la diffusion des modifications de SDA ou de SIL dans un délai de 12 secondes. Les modifications de SDA ou de SIL se produisent généralement lorsque toutes les sources de position sont perdues ou lorsqu’une source de position secondaire est intégrée dans un système ADS-B et que cette source de position secondaire a une valeur SDA ou SIL différente de celle de la source de position primaire. Si vous intégrez plusieurs sources de position avec des valeurs SDA ou SIL différentes, démontrez lors des essais au sol qu’une modification de source de position entraîne une mise à jour des valeurs SDA et SIL dans les 12 secondes. En cas d’intégration d’un émetteur ADS-B avec un GPS non conforme, les valeurs SDA et SIL doivent être réglées à « 0 ». Voir 5.14) pour la seule exception.
16) Remplissage des éléments de message - La section 551.103 du chapitre 551 du MN énumère les paramètres qui doivent être remplis (c’est-à-dire qu’ils ne doivent pas avoir une valeur nulle ou aléatoire) pour l’exploitation dans l’espace aérien, définis par le Manuel des espaces aériens désignés. TCAC considère que l’ADS-B Émission doit transmettre correctement les données ADS-B essentielles en utilisant le 1090ES pour permettre les services de surveillance de NAV CANADA. Il ne faut pas transmettre de données erronées susceptibles de fournir de fausses informations aux aéronefs équipés de systèmes ADS-B Réception. Tous les paramètres transmis par le système ADS-B doivent être conformes aux normes de l’instruction technique normalisée TSO-C166b et ne doivent pas contenir d’informations fausses ou trompeuses. Les systèmes ADS-B Émission qui ne sont pas en mesure d’envoyer les données essentielles doivent désactiver la transmission ADS-B à moins que l’aéronef ne transmette une valeur de 0 (zéro) pour un ou plusieurs indicateurs d’intégrité de position.
5.2 Équipement ADS-B
1) Admissibilité de l’équipement - L’équipement ADS-B doit satisfaire aux exigences de performance spécifiées dans l’instruction technique normalisée TSO-C166b ou dans une révision ultérieure. Une installation conforme doit satisfaire aux exigences de la section 551.103 du chapitre 551 du MN. Pour déroger aux exigences de l’instruction technique normalisée, vous devez obtenir une autorisation de dérogation de la part du ministre. En vertu des dispositions du RAC 521.105 pour l’équipement et du RAC 521.30(1)(d) pour l’installation, il est nécessaire de démontrer que des facteurs ou des caractéristiques de conception offrent un niveau de sécurité équivalent qui compense les normes pour lesquelles une dérogation est demandée.
2) Directives d’installation
- a) Classifications émission/réception mixtes - L’instruction technique normalisée TSO-C166b autorise les configurations d’équipements de classe A en émission seule et de classe A en réception seule. Il n’existe aucune restriction concernant l’installation d’une certaine catégorie d’équipement de réception avec une catégorie différente d’équipement d’émission. Par exemple, une unité d’émission seule de classe A3 peut être utilisée dans le même aéronef qu’une unité de réception seule de classe A1. Il convient toutefois de noter que la section 551.103 du chapitre 551 du MN exige certaines classes de transmission pour la mise en conformité.
- b) Émetteurs 1090ES autonomes - RTCA/DO-260B, section 2.2.2.2, n’autorise que les émetteurs 1090ES autonomes (non intégrés à un transpondeur) pour les classes A0 et B0. La présente CI ne couvre pas l’approbation de l’installation des transmetteurs de classes A0 et B0, car ils ne sont pas conformes à la section 551.103 du chapitre 551 du MN.
- c) Systèmes ADS-B Émission multiples - Si l’aéronef est en mesure d’exploiter simultanément un système 1090ES et un système ADS-B Émission UAT, les systèmes doivent avoir un point d’entrée unique pour le code d’urgence, l’IDENT et le code de mode 3/A. Aucun des deux systèmes ne peut utiliser la fonction d’anonymat (adresse aléatoire). Si des systèmes ADS-B Émission doubles de la même liaison sont installés (par exemple, pour accroître la fiabilité de la préparation des vols), l’installation doit empêcher le fonctionnement simultané des deux systèmes. En outre, les systèmes doubles doivent avoir le même niveau de version, c’est-à-dire que si le système 1090ES répond aux exigences de la norme RTCA/DO-260B (version 2), le système UAT doit répondre aux exigences de la norme RTCA/DO-282B (version 2).
- d) Configuration des paramètres associés - Cette section fournit des conseils supplémentaires sur la configuration des principaux paramètres ADS-B Émission. Les définitions de chacun des paramètres associés suivants sont incluses dans l’annexe A de la CI.
- (i) Adresse 24 bits de l’OACI - Vous devez configurer l’adresse 24 bits de l’OACI lors de l’installation, conformément aux instructions de l’équipementier du système ADS-B. Pour les aéronefs civils canadiens, l’adresse 24 bits de l’OACI est actuellement établie en fonction de la marque d’immatriculation de l’aéronef. Vous pouvez déterminer l’adresse appropriée pour les aéronefs immatriculés au Canada sur le site Web suivant de Transports Canada : https://wwwapps.tc.gc.ca/Saf-Sec-Sur/2/CCARCS-RIACC/RchSimp.aspx?lang=fra
- Remarque 1: L’adresse 24 bits de l’OACI est également utilisée par le transpondeur mode S. Pour l’ajout de l’ADS-B (1090ES) dans une installation de transpondeur mode S existante, vérifiez que l’adresse 24 bits de l’OACI se décode avec la marque d’immatriculation actuelle de l’aéronef.
- Remarque 2: L’adresse 24 bits de l’OACI devra être mise à jour si la marque d’immatriculation de l’aéronef change.
- Remarque 3: Les instructions d’installation peuvent exiger la saisie de l’adresse 24 bits sous la forme d’un nombre octal, décimal ou hexadécimal (c’est-à-dire : octal = 50604331, hexadécimal = A308D9 et décimal = 10684633). Veillez à utiliser le numéro de base correct lors de la configuration du système ADS-B.
- (ii) Longueur et largeur de l’aéronef - Ce paramètre doit être configuré lors de l’installation. La valeur « 0 » ne doit pas être attribuée aux paramètres de longueur et de largeur, car le code de longueur et de largeur est requis selon la section 551.103 du chapitre 551 du MN. Le code de longueur et de largeur choisi doit être la plus petite valeur qui englobe l’ensemble de l’aéronef et tous les objets fixes. Pour les aéronefs à voilure fixe, il peut s’agir du nez ou d’un autre objet fixe situé à l’avant du nez, tel qu’une prise dynamique. Pour les giravions, il peut s’agir du point le plus en avant, le plus en arrière et le plus latéralement balayé par les ailettes de rotor ou d’un autre objet fixe tel qu’une perche de ravitaillement. Voir la Figure 2.
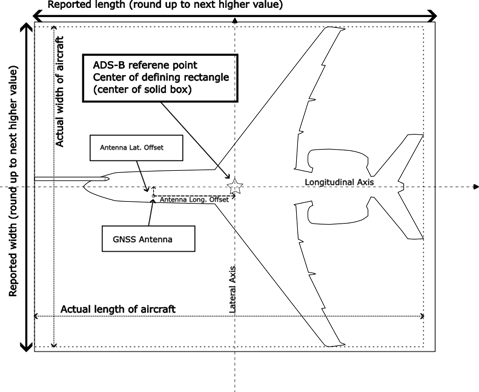
Figure 2 - Longueur, largeur et décalage de l’antenne de l’aéronef
- (iii) Catégorie d’émetteur ADS-B - Définissez la catégorie d’émetteur conformément aux instructions du fabricant. Le Tableau 6 fournit des conseils sur le choix de la catégorie d’émetteur appropriée en fonction du type d’aéronef sur lequel il est installé.
Tableau 6 - Catégories d’émetteurs Catégorie d’émetteurs
Description
Pas de catégorie d’émetteur
N’utilisez pas cette catégorie d’émetteurs. Si aucune catégorie d’émetteurs ne correspond à votre installation, demandez conseil à Transports Canada.
Avion léger < 15 500 lb
(< 7 031 kg)Tout avion dont la masse maximale au décollage est inférieure à 15 500 livres (7 031 kg). Cela inclut les avions très légers tels que définis dans le paragraphe 521.01, division I, sous-partie 21, partie 5 du Règlement de l’aviation canadien.
Petit avion ≥ 15 500 à < 75 000 lb (≥ 7 031 à < 34 019 kg)
Tout avion dont la masse maximale au décollage est supérieure ou égale à 15 500 livres (7 031 kg) mais inférieure à 75 000 livres (34 019 kg).
Gros avion ≥ 75 000 à
< 300 000 lb
(≥ 34 019 à < 136 078 kg)Tout avion dont la masse maximale au décollage est supérieure ou égale à 75 000 livres mais inférieure à 300 000 livres (136 078 kg) et qui n’entre pas dans la catégorie turbulence de sillage élevée.
Gros avion à turbulence de sillage élevée
Tout avion dont la masse maximale au décollage est supérieure ou égale à 75 000 livres (34 019 kg) mais inférieure à 300 000 livres (136 078 kg) et dont il a été déterminé qu’il génère une turbulence de sillage élevée. Actuellement, le Boeing 757 en est le seul exemple.
Lourd ≥ 300 000 lb
(≥ 136 078 kg)Tout avion dont la masse maximale au décollage est égale ou supérieure à 300 000 livres (136 078 kg).
Haute performance > 5 g et > 400 TAS
Tout avion, quel que soit son poids, capable de manœuvrer à plus de 5 g et de maintenir une vitesse vraie supérieure à 400 nœuds.
Giravion
Tout giravion, quel que soit son poids.
Planeur
Tout planeur, quel que soit son poids.
Aérostat
Tout aérostat (dirigeable ou ballon), quel que soit son poids.
Parachute/parachutiste
Utilisé par les parachutistes.
Véhicule ultra-léger
Véhicules ultra-légers de base et avancés tels que définis dans la sous-partie 101 de la partie 1 du Règlement de l’aviation canadien.
SATP
Tout aéronef ou système télépiloté, quel que soit son poids.
Véhicule spatial/transatmosphérique
Pour les véhicules spatiaux/transatmosphériques.
Aucune information sur la catégorie d’émetteurs ADS-B
N’utilisez pas cette catégorie d’émetteurs. Si aucune catégorie d’émetteurs ne correspond à votre installation, demandez conseil à Transports Canada.
Véhicule de surface — Véhicule d’intervention d’urgence
Pour les véhicules d’intervention d’urgence de surface.
Véhicule de surface — Véhicule de service
Pour les véhicules de surface.
Obstacle ponctuel (notamment, ballons captifs)
Pour les obstacles ponctuels, y compris les ballons captifs.
Obstacle en grappe
Pour les obstacles en grappe.
Obstacle en ligne
Pour les obstacles en ligne.
- (iv) Numéro de version MOPS - Définir le niveau/numéro de version MOPS de l’instruction technique normalisée (TSO). La version 2 s’applique à l’équipement ADS-B conforme aux documents MOPS RTCA/DO-260B avec rectificatif 1 ou RTCA/DO-282B avec rectificatif 1. L’équipement ADS-B produisant la version 2 ou une version plus récente est requis par la section 551.103 du chapitre 551 du MN.
- (v) Assurance de la conception du système (SDA) - la SDA doit être définie conformément à l’évaluation de la sécurité du système. Voir 5.14), 5.115) pour plus de détails sur la configuration de ce paramètre.
5.3 Source de position
1) Admissibilité de l’équipement - La section 551.103 du chapitre 551 du MN est basée sur la performance et n’exige pas de source de position spécifique. Les normes existantes en matière d’équipement de navigation et de navigabilité doivent être utilisées, mais elles doivent tenir compte des exigences particulières liées à l’ADS-B. Une autorisation sous forme d’instruction technique normalisée ne suffit pas à garantir la compatibilité avec l’ADS-B. L’annexe B de la présente CI contient de plus amples informations sur l’identification et la qualification des sources de position appropriées. La conformité à l’annexe B peut être documentée dans les instructions d’installation du fabricant de la source de position.
Remarque : Toutes les sources de position GNSS n’offrent pas la même disponibilité. Voir l’annexe B pour plus d’informations sur la disponibilité du GNSS.
La source de position doit être installée conformément aux directives applicables. De nouvelles sources de position GNSS peuvent être installées conformément à l’AC 20-138(), Airworthiness Approval of Positioning and Navigation Systems de la FAA.
2) Interface entre la source de position et l’équipement ADS-B - À moins que le fabricant de l’équipement ADS-B n’ait analysé l’interface entre la source de position et l’équipement ADS-B que vous installez et qu’il ait spécifiquement répertorié la source de position dans le manuel d’installation de l’équipement ADS-B, vous devez fournir une analyse de l’interface entre la source de position et l’équipement ADS-B qui démontre que les informations relatives à la position, à la vitesse, à la précision de la position, à l’intégrité de la position et à la précision de la vitesse provenant de la source de position sont correctement interprétées par l’équipement ADS-B. Lors de l’installation de modifications à une source de position, l’installateur doit déterminer et tester les parties du système ADS-B qui sont affectées par la modification et s’assurer que le système ADS-B n’est pas affecté.
Remarque : Cette analyse nécessitera des données de conception technique de la part du fabricant de l’équipement ADS-B et/ou du fabricant de la source de position.
3) Source de position secondaire - Il n’est pas nécessaire d’avoir une entrée de source de position secondaire. Cependant, si vous créez une interface entre une source de position secondaire et le système ADS-B, elle doit répondre aux exigences de l’annexe B de la présente CI.
Remarque : Si une source de position n’est pas en mesure de fournir les valeurs de précision et d’intégrité de la section 551.103 du chapitre 551 du MN, elle ne permettra pas à l’aéronef d’opérer dans l’espace aérien nécessitant l’ADS-B, tel que défini par le MEAD.
4) Sélection de la source de position - Si plusieurs sources de position (telles que MMR/GPS, IRS/INS/ADIRU ou GPS1 et GPS2) sont mises en interface avec l’équipement ADS-B, la sélection de la source peut être effectuée manuellement par le pilote, automatiquement par le système de navigation de l’aéronef ou par l’équipement ADS-B. Nous décourageons la sélection automatique de la source de position ADS-B sur la seule base de la source de navigation utilisée, car les exigences opérationnelles imposent parfois une source de navigation qui peut ne pas offrir la meilleure performance de l’équipement ADS-B. Si l’équipement ADS-B effectue la sélection de la source de position, il doit le faire conformément à l’instruction technique normalisée TSO-C166b. Si plusieurs sources sont connectées au système ADS-B, l’équipage de conduite doit pouvoir déterminer facilement quelle source est sélectionnée. La description de la manière dont cette sélection est effectuée dans le MVA est un moyen acceptable de conformité.
Remarque : L’instruction technique normalisée TSO-C166b exige que l’équipement ADS-B utilise une seule source de position à un moment donné pour la latitude, la longitude, la vitesse horizontale, les mesures de précision et les mesures d’intégrité.
5) Source de position pour la navigation - La source de position ADS-B ne doit pas nécessairement être la même que celle utilisée pour la navigation. Il est acceptable qu’une source de position GNSS soit intégrée dans l’équipement ADS-B et fournisse des informations de position au système ADS-B sans fournir d’informations de navigation à d’autres systèmes embarqués. Comme indiqué dans l’annexe B de cette CI, une source de position GNSS intégrée doit toujours répondre aux exigences de l’instruction technique normalisée TSO-C145(), TSO-C146() ou TSO-C196().
6) Configuration des paramètres associés - Cette section fournit des conseils supplémentaires sur la configuration des principaux paramètres ADS-B Émission. Les définitions de chacun des paramètres associés suivants sont incluses dans l’annexe A.
- a) Latitude et longitude - L’équipement ADS-B doit définir la latitude et la longitude sur la base des informations de position en temps réel fournies par la source de position.
- b) Vitesse horizontale - L’équipement ADS-B doit définir la vitesse horizontale sur la base des informations de vitesse en temps réel fournies par la source de position. L’équipement ADS-B doit transmettre une vitesse nord/sud et une vitesse est/ouest lorsqu’il est en vol, ainsi qu’une combinaison de vitesse au sol et de trace au sol ou de cap lorsqu’il est en surface. Assurez-vous que la source de position fournit la vitesse horizontale dans les deux formats ou que l’équipement ADS-B peut assurer une conversion correcte des formats. Nous recommandons de transmettre le cap au lieu de la trace au sol lorsque vous êtes en surface. Reportez-vous à la section 5.53) de cette CI pour plus d’informations sur l’interfaçage de cap.
- c) Position horizontale de surface - L’équipement ADS-B doit définir la latitude et la longitude sur la base des informations de position en temps réel fournies par la source de position. Ce paramètre est transmis au sol et est activé par la logique air/sol.
- d) Niveau d’intégrité de source (SIL) - Le SIL est généralement une valeur statique (immuable) qui peut être définie au moment de l’installation si un seul type de source de position est intégré au système ADS-B. Le SIL est basé uniquement sur la probabilité que la source de position dépasse la valeur d’intégrité déclarée et il doit être configuré en fonction des données de conception du fabricant de l’équipement de la source de position. Les installations qui obtiennent le SIL à partir de sources de position GNSS conformes à toute révision des instructions techniques normalisées TSO-C129, TSO-C145, TSO-C146 ou TSO-C196 et qui produisent un niveau de protection horizontale (HPL) ou un niveau d’intégrité horizontale (HIL) doivent définir le SIL = 3 parce que le HPL et le HIL sont basés sur une probabilité de 1x10-7 par heure. Ne fondez pas le NIC ou le SIL sur des informations relatives au niveau d’incertitude horizontale (HUL). En cas d’intégration avec un GPS non conforme, le SIL doit être réglé sur « 0 ».
- e) Supplément au niveau d’intégrité de la source (SILSUPP) - Le SILSUPP est basé sur la probabilité que la source de position dépasse la valeur d’intégrité déclarée calculée par heure ou par échantillon et il doit être défini en fonction des données de conception du fabricant de l’équipement de la source de position. Les systèmes ADS-B en interface avec une source de position GNSS conforme à toute révision de l’instruction technique normalisée TSO-C129, TSO-C145, TSO-C146 ou TSO-C196 peuvent prérégler le SILSUPP sur « ZÉRO », étant donné que les sources de position GNSS utilisent une base horaire pour l’intégrité.
- f) Catégorie d’intégrité de la navigation (NIC) - L’équipement ADS-B doit définir la NIC en fonction de la mesure d’intégrité en temps réel fournie par la source de position. Lors de la mise en interface de sources de position GNSS, le NIC doit être basé sur le HPL ou sur le HIL. Toutefois, bien que des valeurs HPL nettement inférieures à 0,1 mille nautique (nm) puissent être obtenues à partir de sources GNSS à fréquence unique, il se peut que le HPL n’atteigne pas le niveau de protection indiqué, car il existe des conditions d’erreur qui ne sont plus considérées comme négligeables. Vous devez examiner les données de conception de la source de position pour déterminer si toutes les sources d’erreur sont prises en compte ou si la source de position limite la sortie HPL, lors du calcul d’un HPL basé sur la surveillance autonome de l’intégrité du récepteur (RAIM) non renforcée. Ceci s’applique à toutes les sources de position indiquées dans les instructions techniques normalisées TSO-C129() et TSO-C196(), et aux sources de position des TSO-C145() et TSO-C146() lorsqu’elles fonctionnent en modes non renforcés où l HPL est basé sur la RAIM. Cela peut s’appliquer à certaines sources de position, même lorsqu’elles fonctionnent en mode renforcé. Si la source de position ne tient pas compte de toutes les erreurs ou n’effectue pas la limitation HPL appropriée, vous devez vous assurer que vous mettez la source de position en interface avec un équipement ADS-B qui limite le NIC ≤ 8. Consultez l’annexe B du présent document pour plus d’informations sur les considérations relatives au HPL.
- g) Catégorie de précision de navigation pour la position (NACP) - L’équipement ADS-B doit définir la NACP sur la base de la mesure de précision en temps réel de 95 % fournie par la source de position. Lors de la mise en interface de sources GNSS, la NACP doit être basée sur une figure de mérite horizontale qualifiée (HFOM).
- h) Catégorie de précision de navigation pour la vitesse (NACV) - Réglez la NACV en fonction des données de conception fournies par le fabricant de la source de position. La NACV peut être mise à jour dynamiquement à partir de la source de position, ou définie de manière statique en fonction de la qualification de la source de position.
- Une NACV = 1 (< 10 m/s) peut être réglée de façon permanente à l’installation pour les équipements GNSS satisfaisant aux essais définis à l’annexe B de la présente CI, ou peut être réglée de façon dynamique à partir de la précision de la vitesse fournie par une source de position qualifiée conformément aux orientations de l’annexe B.
- Une NACV = 2 (< 3 m/s) doit être réglée dynamiquement à partir de la sortie de précision de la vitesse d’une source de position qualifiée conformément aux orientations de l’annexe B. Ne préréglez pas de façon permanente un NACV = 2 lors de l’installation, même si la source de position a passé avec succès les essais indiqués à l’annexe B.
- Un NACP = 3 ou un NACV = 4 ne doit pas être défini sur la base de la précision de la vitesse du GNSS, à moins que vous ne puissiez démontrer au ministre que la précision de la vitesse répond effectivement à l’exigence.
- i) Altitude géométrique - Assurez-vous que l’altitude géométrique fournie par la source de position est basée sur la hauteur au-dessus de l’ellipsoïde (HAE) plutôt que sur la hauteur au-dessus du géoïde (HAG). Ne mettez pas en interface une source de position qui fournit une altitude HAG ou MSL à l’équipement ADS-B, sauf si l’équipement ADS-B a la capacité de déterminer la différence entre une entrée HAG et HAE, et si l’équipement ADS-B a démontré lors de l’approbation de la conception qu’il peut convertir correctement une HAG en HAE en utilisant le même modèle que la source de position. Il serait également acceptable de démontrer que l’erreur due à la conversion de HAG en HAE n’entraîne pas un dépassement de la précision géométrique verticale.
- j) Précision géométrique verticale (GVA) - paramètre facultatif - Si elle est disponible, la GVA est définie en fonction des données de conception fournies par le fabricant de la source de position. Les sources de position GNSS peuvent fournir la précision géométrique de l’altitude par le biais de la figure de mérite vertical (VFOM). Si la source de position n’émet pas de mesure de précision verticale qualifiée, le paramètre GVA doit être réglé sur « 0 ».
- k) Angle de route-sol - Pour les installations qui ne disposent pas d’informations sur le cap, la route-sol de la source de position doit être transmise pendant la présence en surface. De nombreuses sources de position fournissent des informations précises sur la route-sol, mais celle-ci ne peut être précise qu’à partir d’une certaine vitesse. Si la route-sol de la source de position est imprécise en deça d’une certaine vitesse au sol et que la source de position n’empêche pas la sortie de la route-sol à ces vitesses plus lentes, l’installateur doit s’assurer que l’équipement ADS-B a la capacité d’invalider la route-sol lorsque la vitesse au sol du GNSS tombe sous 7 nœuds. Des relevés erronés de la route-sol peuvent induire en erreur les opérations de surface de l’ATC et les applications ADS-B Réception. Si la source de position elle-même empêche la sortie de la route-sol à des vitesses plus lentes où la route-sol serait imprécise, l’installateur peut mettre la route-sol de la source de position en interface avec l’équipement ADS-B sans aucune restriction.
5.4 Source d’altitude barométrique
1) Admissibilité de l’équipement - Utilisez l’altitude barométrique d’un altimètre barométrique répondant aux exigences minimales de performance de la section 551.103 du chapitre 551 du MN. Les éléments suivants constituent chacun un moyen acceptable de mise en conformité :
- a) TSO-C10, Altimeter, Pressure Actuated, Sensitive Type (toute révision)
- b) TSO-C106, Air Data Computer (toute révision)
- c) Veillez à ce que l’équipement ait été testé et étalonné pour transmettre des données d’altitude correspondant à 125 pieds près (avec une probabilité de 95 %) au point de référence indiqué ou étalonné à l’aide de l’altimètre normalement utilisé pour maintenir l’altitude de vol, cet altimètre étant référencé à 29,92 pouces de mercure / 1013.2 mbar pour des altitudes allant du niveau de la mer à l’altitude maximale d’exploitation de l’aéronef.
- Remarque : Le cas échéant, utilisez un numériseur répondant aux exigences minimales de performance de toute révision de l’instruction technique normalisée TSO-C88, Automatic Pressure Altitude Reporting Code-Generating Equipment.
2) Directives d’installation - L’altitude barométrique utilisée pour la diffusion ADS-B doit provenir de la même source d’altitude que l’altitude barométrique utilisée pour la réponse du transpondeur ATC de mode C, si un transpondeur à codage d’altitude est installé dans l’aéronef.
3) La section 551.103 du chapitre 551 du MN ne modifie pas les directives réglementaires existantes concernant la précision ou la résolution de l’altitude barométrique. Par exemple, si une opération nécessite une résolution d’altitude de 25 pieds ou une précision de 604.56 du RAC (exigences RVSM), cette résolution et cette précision doivent se refléter dans le message ADS-B.
4) Si une source d’altitude secondaire est utilisée lorsqu’un transpondeur secondaire est sélectionné ou si une source d’altitude secondaire est sélectionnée pour un seul transpondeur, la source d’altitude pour l’ADS-B doit également être modifiée afin que la source d’altitude reste la même pour le transpondeur et pour le système ADS-B.
5) Configuration des paramètres associés - Cette section fournit des conseils supplémentaires sur la configuration des principaux paramètres ADS-B Émission. Les définitions de chacun des paramètres associés suivants sont incluses dans l’annexe A.
- a) Altitude barométrique - L’équipement ADS-B doit mettre à jour l’altitude barométrique en fonction de l’altitude barométrique en temps réel fournie par la source d’altitude barométrique.
- b) Code d’intégrité de l’altitude barométrique (NICBARO) - paramètre facultatif - S’il est disponible, vous devez vérifier le type de source d’altitude installée dans l’aéronef et interfacer le système d’altitude conformément aux instructions du fabricant de l’équipement ADS-B. Pour les aéronefs dotés d’une source d’altitude approuvée autre que Gillham, le NICBARO doit être préréglé à l’installation sur « ONE ». Pour les avions équipés d’une source d’altitude Gillham sans contrôle croisé automatique, le NICBARO doit être préréglé à l’installation sur « ZERO ». Pour les aéronefs qui recoupent dynamiquement une source d’altitude de Gillham avec une seconde source d’altitude, le NICBARO doit être réglé en fonction du résultat de ce contrôle croisé. Nous recommandons que les installations ADS-B utilisent des codeurs d’altitude autres que ceux de Gillham afin de réduire le risque d’erreurs d’altitude.
- c) Altitude sélectionnée - S’il est disponible, ce paramètre doit envoyer l’altitude sélectionnée affichée à l’équipage de conduite sur le système de gestion de vol/panneau de commande principal/unité de commandes de vol/panneau de guidage du système de pilotage automatique, ou tout autre système guidant l’aéronef verticalement, selon le cas.
- d) Réglage de la pression barométrique - S’il est disponible, ce paramètre doit envoyer le réglage de la pression barométrique sélectionné par l’équipage de conduite, moins 80 000 Pascals.
5.5 Source de cap
1) Admissibilité de l’équipement - Pour les installations qui intègrent le cap dans les mouvements de surface, la source de cap doit répondre aux exigences minimales de performance de toute révision de l’instruction technique normalisée TSO-C5, Direction Instrument, Non-Magnetic (Gyroscopically Stabilized), ou de toute révision de l’instruction technique normalisée TSO-C6, Direction Instrument, Magnetic (Gyroscopically Stabilized). L’équipement doit disposer de l’autorisation appropriée en lien avec l’installation et la navigabilité.
2) Directives d’installation - Le cap ne doit pas nécessairement provenir de la même source que la position et la vitesse. La mise en interface du cap n’est pas obligatoire, mais elle est fortement encouragée si l’aéronef dispose d’une source de cap approuvée.
3) Configuration des paramètres associés - Lorsque l’aéronef est à la surface, le système ADS-B doit transmettre soit le cap, soit la route-sol; nous recommandons toutefois de transmettre le cap si une source d’information sur le cap est disponible et valide. Le cap vrai est préférable, mais le cap magnétique est acceptable. Veillez à ce que le type de cap (vrai ou magnétique) interfacé à l’équipement ADS-B corresponde au type de cap transmis par l’équipement ADS-B.
5.6 Source TCAS
1) Admissibilité de l’équipement - Les systèmes TCAS II doivent être conformes à l’instruction technique normalisée TSO-C119a, Traffic Alert and Collision Avoidance System (TCAS) Airborne Equipment, TCAS II, ou à une version ultérieure, et être installés conformément à l’AC 20-131A, Airworthiness Approval of Traffic Alert and Collision Avoidance Systems (TCAS II) and Mode S Transponders de la FAA, ou à toute révision de l’AC 20-151, Airworthiness Approval of Traffic Alert and Collision Avoidance Systems (TCAS II), Versions 7.0 et 7.1 de la FAA et des transpondeurs de mode S associés, le cas échéant. Aucune interface ADS-B n’est disponible ou requise pour les systèmes TCAS I.
Remarque : De nombreux aéronefs seront équipés d’un transpondeur de mode S avec fonctionnalité ADS-B et d’un TCAS II. Le transpondeur de mode S est considéré comme un composant du système TCAS II et également comme un composant du système ADS-B.
2) Directives d’installation
- a) Interface TCAS II - Le TCAS II n’est pas un élément obligatoire du système ADS-B; toutefois, si le TCAS II est installé sur votre aéronef, l’équipement doit être intégré de manière à ce que les paramètres « TCAS installed and operational » (TCAS installé et opérationnel) et « TCAS traffic status » (État du trafic TCAS) indiquent l’état du TCAS II en temps réel.
- b) Surveillance hybride TCAS II - Si un système ADS-B Réception est installé dans un aéronef équipé d’un système de surveillance hybride TCAS II conforme à la norme RTCA/DO-300(), Minimum Operational Performance Standards (MOPS) for Traffic Alert and Collision Avoidance System II (TCAS II) Hybrid Surveillance, le TCAS II utilisera les données de position ADS-B Réception pour réduire les taux d’interrogation des intrus à faible menace. Les informations transmises par les systèmes ADS-B Émission installés conformément aux indications de la présente CI peuvent être utilisées pour la surveillance hybride du TCAS II. Consultez l’AC 20-151() de la FAA pour plus d’informations sur la surveillance hybride.
- c) Messages du TCAS - La transmission par l’ADS-B des messages « TCAS operational » (TCAS opérationnel) ou « TCAS Resolution Advisory (RA) active » (Avis de résolution RCAS actif) n’augmente pas le niveau de risque de l’équipement ADS-B défini dans l’instruction technique normalisée TSO-C166b.
3) Configuration des paramètres associés - Cette section fournit des conseils supplémentaires sur la configuration des principaux paramètres ADS-B Émission. Les définitions de chacun des paramètres associés suivants sont incluses dans l’annexe A de la présente CI.
- a) TCAS installé et opérationnel - Ce paramètre doit s’interfacer avec le système TCAS II si un système TCAS II est installé sur votre avion. Ce paramètre doit être préréglé sur « ZERO » si votre avion n’est pas équipé d’un TCAS II ou si votre avion est équipé d’un TCAS I. En général, ce paramètre est déjà fourni par le TCAS II au transpondeur de mode S. Les systèmes TCAS II conformes à l’instruction technique normalisée TSO-C119() indiquent qu’ils sont opérationnels et capables d’émettre un avis de résolution (RA) lorsqu’ils transmettent au transpondeur une information de réponse (RI) = 3 ou 4.
- b) État du trafic TCAS - Ce paramètre doit être mis en interface avec le système TCAS II si un système TCAS II est installé sur votre avion. Le paramètre de l’état du trafic du TCAS peut être préréglé sur « ZERO » conformément aux instructions du fabricant de l’équipement ADS-B si un TCAS II n’est pas installé.
5.7 Interface pilote
1) Directives d’installation
- a) État du système - L’installation doit disposer d’une méthode permettant d’afficher l’état de fonctionnement du système à l’intention de l’équipage de conduite et doit être cohérente avec la philosophie générale de conception du poste de pilotage. Le système doit afficher les données de l’équipage de conduite telles que le code de mode 3/A, les codes d’urgence, l’IDENT et l’indicatif d’appel. Si un transpondeur existant est utilisé pour introduire les codes de mode 3/A, les codes d’urgence et l’IDENT dans le système ADS-B, l’interface de contrôle du transpondeur actuel est suffisante. Les deux annonces de défaillance suivantes doivent être incluses dans les données de définition de type de la certification initiale de navigabilité (c’est-à-dire STC ou TC) pour l’équipement ADS-B Émission et doivent être cohérentes avec la philosophie générale de conception du poste de pilotage pour l’équipement de surveillance. Ces conditions de défaillance ne sont que des conseils et ne constituent pas une mise en garde ou un avertissement.
- (i) Panne de l'appareil ADS-B - si l'équipement ADS-B est incapable de transmettre des messages ADS-B, le système doit fournir une annonce appropriée à l'équipage de conduite.
- (ii) Panne de la fonction ADS-B - Le système ADS-B dépend d'une source de position pour fournir les données nécessaires à l'alimentation des messages et des rapports ADS-B. Si la source de position ou son interface avec l'équipement ADS-B tombe en panne, le système ADS-B ne pourra pas diffuser les données ADS-B requises. Dans ce cas, l'équipement ADS-B n'est pas tombé en panne, mais il ne peut pas remplir sa fonction en raison d'un échec de réception des données sources de position. Le système ADS-B doit faire la distinction entre une panne de source de position ou d'interface et une panne d'équipement ADS-B. L'installateur doit fournir documentation, dans le manuel de vol applicable ou dans un supplément au manuel de vol, qui explique comment faire la différence entre l'annonce d'une panne d'équipement et une panne de fonction si les annonces de panne ne sont pas indépendantes. La défaillance de la fonction ADS-B ne doit pas entraîner une défaillance du système TCAS II.
- Remarque : Certaines applications ADS-B IN avancées peuvent nécessiter que l'équipage de conduite connaisse l'état opérationnel de l'ADS-B OUT de son propre aéronef. Reportez-vous à l'AC 20-172() pour obtenir des conseils concernant les installations ADS-B IN.
- b) Désactiver l’ADS-B - L’article 605.35 du RAC exige que tous les aéronefs équipés d’un transpondeur et d’un équipement de transmission automatique de l’altitude-pression soient exploités avec l’équipement allumé en tout temps. En outre, la section 551.103 du chapitre 551 du MN inclut l’ADS-B Émission dans ces équipements. Cependant, l'ATC peut demander que l'ADS-B soit désactivé pour certaines opérations au sol spécifiques. Lorsque la fonctionnalité ADS-B réside dans le transpondeur de mode S, il est possible de désactiver les transmissions ADS-B en désactivant le transpondeur (c’est-à-dire, en le réglant sur « Standby » ou « Off »). Si cette architecture est utilisée, il convient de préciser l’impact dans le manuel de vol ou dans le guide du pilote (par exemple, perte des fonctionnalités ADS-B, transpondeur et TCAS). Positionnez les commandes d’activation et de désactivation de l’ADS-B de manière à éviter tout déclenchement intempestif.
2) Configuration des paramètres associés - Cette section fournit des conseils supplémentaires sur la configuration des principaux paramètres ADS-B Émission. Les définitions de chacun des paramètres associés suivants sont incluses dans l’annexe A de la présente CI.
- a) Indicatif d’appel/identification de vol - La marque d’immatriculation de l’aéronef doit être définie comme indicatif d’appel/identification de vol lors de l’installation. Les procédures de sélection dynamique d’un indicatif d’appel doivent être incluses dans le manuel de vol ou dans le guide du pilote si l’équipement ADS-B permet d’entrer un indicatif d’appel de radiotéléphonie. S’il peut être sélectionné par le pilote, l’indicatif d’appel/l’identification de vol doit être facilement visible pour l’équipage de conduite. Lorsque le système de l’aéronef est mis sous tension, l’indicatif d’appel/l’identification de vol doit être rempli. Lors de la mise sous tension initiale, il est acceptable que l’indicatif d’appel/l’identification de vol revienne à un indicatif d’appel qui existait avant la mise hors tension du système, ou à la marque d’immatriculation de l’aéronef.
- Remarque : L’indicatif d’appel/identification de vol prédéfini devra être mis à jour si le numéro d’immatriculation de l’aéronef change.
- b) État d’urgence - L’installation doit permettre au pilote de saisir l’état d’urgence de l’aéronef. Bien que l’instruction technique normalisée TSO-C166b identifie plusieurs codes d’urgence, seuls les codes d’urgence générale, d’absence de communication et d’interférence illicite doivent être disponibles pour la diffusion. Il est acceptable de baser l’état d’urgence ADS-B sur le code d’état d’urgence entré dans le transpondeur (c’est-à-dire les codes 7500, 7600 et 7700 de mode 3/A). Reportez-vous à la section 5.72)e) de la présente CI pour obtenir des informations sur le point d’entrée unique de l’état d’urgence.
- c) IDENT - L’installation doit permettre au pilote d’entrer dans la fonction IDENT. Consultez la section 5.72)e) de la présente CI pour obtenir des informations sur le point d’entrée unique de l’IDENT.
- d) Code de mode 3/A - L’installation doit prévoir un moyen pour le pilote d’entrer le code de mode 3/A. Consultez la section 5.72)e) de la présente CI pour obtenir des informations sur le point d’entrée unique du code de mode 3/A.
- e) Point d’entrée unique - Les aéronefs équipés d’un transpondeur et d’un système ADS-B distincts doivent offrir au pilote un point d’entrée unique dans les deux systèmes pour le code de mode 3/A, l’IDENT et l’état d’urgence. Si l’équipement ADS-B définit l’état d’urgence, l’IDENT ou le code de mode 3/A sur la base de l’entrée de ces paramètres dans un transpondeur séparé, le STC/TC doit identifier les interfaces de transpondeur appropriées. Les mesures d’atténuation prises par l’exploitant pour empêcher l’entrée de codes différents dans le transpondeur et le système ADS-B ne sont pas acceptables. En outre, l’obligation pour le pilote d’entrer plusieurs fois le code de mode 3/A, l’IDENT et les codes d’urgence pose des problèmes de charge de travail et de sécurité. Par conséquent, si vous ne fournissez pas un point d’entrée unique pour le code de mode 3/A, l’IDENT et le code d’urgence, vous devez procéder à une évaluation des facteurs humains et à une évaluation supplémentaire de la sécurité du système comme suit :
- (i) Évaluation des facteurs humains. Les installations n’offrant pas un point d’entrée unique doivent procéder à une évaluation des commandes de l’interface pilote afin de s’assurer que la conception réduit au minimum le risque d’erreurs de saisie de la part de l’équipage de conduite et permet à ce dernier de détecter et de corriger les erreurs qui se produisent. Évaluez la conception de l’interface du système pour s’assurer que la double saisie de l’état d’urgence, de l’IDENT et du code de mode 3/A n’entraîne pas une charge de travail supplémentaire importante, en particulier lors de la communication d’un état d’urgence à bord d’un aéronef. Pour plus d’informations sur l’évaluation des facteurs humains, voir la section 6.212) de la présente CI.
- (ii) Évaluation de la sécurité des systèmes. La transmission d’informations fausses ou trompeuses est considérée comme un effet de défaillance majeure et ne peut se produire à un taux supérieur à 1x10-5 par heure de vol pour les systèmes ADS-B. Les installations n’offrant pas un point d’entrée unique doivent réaliser une évaluation de la sécurité démontrant que la probabilité que le transpondeur et le système ADS-B transmettent des codes de mode 3/A différents est inférieure à 1x10-5 par heure de vol. L’analyse doit prendre en compte le potentiel de toutes les erreurs de pilotage.
5.8 Interface antenne ADS-B
1) Emplacement de l’antenne et nombre requis - Le système d’antenne ADS-B de l’aéronef est un élément fondamental de l’architecture ADS-B Émission globale, car les systèmes d’antenne (comprend aussi les câbles et les connecteurs) contribuent largement aux performances de la liaison du système. L’emplacement et le nombre d’antennes nécessaires pour le système ADS-B Émission aéroporté dépendent des contraintes de chaque installation, où le blocage du trajet du signal, l’orientation correcte, la résistance structurelle et d’autres paramètres doivent être pris en compte pour concevoir un système d’antennes permettant d’obtenir un gain de diagramme d’émission minimal acceptable dans les hémisphères supérieur et inférieur de l’aéronef.
2) En règle générale, pour les aéronefs de construction métallique, un système avec diversité d’antennes sera la configuration la plus simple avec de telles capacités. Dans ce cas, le système aura deux antennes, l’une montée sur le dessus et l’autre sur le dessous de l’avion, offrant une vue illimitée des transmissions vers les récepteurs satellite et au sol. Toutefois, certains aéronefs construits avec des matériaux transparents aux radiofréquences (RF) dans la bande de fréquence 1090ES, pourraient être en mesure d’utiliser un système qui peut démontrer un gain de diagramme d’émission acceptable dans les hémisphères supérieur et inférieur de l’aéronef, avec une seule antenne. Dans ce cas, l’emplacement de l’antenne doit être déterminé avec soin en tenant compte des contraintes particulières de l’aéronef et il doit être vérifié à l’aide d’essais.
3) Admissibilité de l’équipement - Les antennes ADS-B doivent répondre aux exigences définies dans le manuel d’installation du fabricant de l’équipement ADS-B.
4) Directives d’installation
- a) Utilisation d’une antenne existante - Lors de l’utilisation d’un système d’antenne existant, si l’installation ne modifie pas les antennes existantes, le câblage, les connecteurs ou les spécifications de sortie, il n’est pas nécessaire de réévaluer l’installation de l’antenne.
- Remarque : Le système d’antenne existant doit être capable d’émettre avec, au moins, la puissance apparente rayonnée (PAR) définie dans la section DO-260B 3.3.4.6 vers les hémisphères supérieur et inférieur.
- b) Installation d’un nouveau transpondeur partagé/antenne ADS-B - Pour vérifier les capacités du transpondeur, suivez les conseils d’installation de l’antenne du transpondeur dans la CI 20-151().
- c) Analyse structurelle - Il se peut que vous deviez soumettre une analyse structurelle de l’installation d’une nouvelle antenne afin de démontrer la conformité avec les réglementations en vigueur.
- d) Antenne unique - Les installations à antenne unique doivent pouvoir émettre vers des récepteurs spatiaux et terrestres. La section 6 de la présente CI contient plus de détails.
- e) Suppression mutuelle - Suivre les instructions du fabricant de l’équipement ADS-B pour interfacer l’équipement ADS-B Émission au bus de suppression mutuelle.
5) Configuration des paramètres associés - Cette section fournit des conseils supplémentaires sur la configuration des principaux paramètres ADS-B Émission. Les définitions de chacun des paramètres associés suivants sont incluses dans l’annexe A de la présente CI.
- a) Décalage d’antenne GNSS et décalage de position appliqué (POA) - paramètre facultatif - S’il est disponible, le paramètre de décalage de l’antenne GNSS et de décalage de position appliqué doit être réglé en conséquence, s’il est transmis. Le point de référence de position de l’ADS-B est le centre du rectangle utilisé pour décrire la longueur et la largeur de l’aéronef dans le code de longueur et de largeur. Référez-vous à la Figure 2 de cette CI. Pour une description plus détaillée du POA, consultez RTCA/DO-338, Minimum Aviation System Performance Standards (MASPS) for ADS-B Traffic Surveillance Systems and Applications (ATSSA), section 3.2.4.1.
- Si l’équipement ADS-B est relié à plusieurs sources de position GNSS qui utilisent des antennes GNSS situées à différents endroits de l’aéronef et que ce paramètre facultatif est transmis, l’installation doit prévoir des dispositions pour garantir que le décalage approprié de l’antenne GNSS est transmis lorsque l’équipement ADS-B passe d’une source de position à une autre.
- Le réglage du POA de l’antenne GNSS indique si la position de diffusion du véhicule est référencée soit a) au point de référence de la position ADS-B de l’aéronef, soit b) à la distance latérale par rapport à l’axe central et à la distance longitudinale par rapport à la partie la plus avancée de l’aéronef.
- Remarque : La position transmise doit être ajustée au point de référence décrit ci-dessus dans ce paragraphe OU les décalages de l’antenne GNSS doivent être fournis. Il n’est pas nécessaire de faire les deux.
- b) Bit d’antenne unique - paramètre facultatif - S’il est disponible, le protocole de données 1090 ES comprend un bit pour indiquer, à tout moment, si une seule antenne ou les deux antennes (si elles sont installées) sont fonctionnelles et doivent être réglées sur la valeur appropriée. Pour les aéronefs utilisant une seule antenne, ce paramètre doit être réglé sur un, « True ».
5.9 Source de taux vertical
1) Nous recommandons que le système ADS-B affiche le champ optionnel de taux vertical lorsqu’il est disponible. Le taux vertical peut provenir d’un calculateur de données aérodynamiques barométriques, d’une source GNSS ou d’un système qui filtre les taux verticaux barométriques et géométriques. Le taux vertical provient généralement d’une source de position ou d’un calculateur de données aérodynamiques. Cette section traite de ce paramètre unique.
2) Admissibilité de l’équipement - Contrairement à la précision de la position, la précision de la vitesse verticale n’est pas transmise dans les messages ADS-B. Il est donc important que les sources de vitesse verticale intégrées dans le système ADS-B répondent à des exigences minimales de performance au moment de l’installation. Utilisez les directives suivantes :
- a) Source de taux vertical hybride - Le taux vertical peut être obtenu à partir d’un système hybride qui filtre le taux vertical barométrique avec le taux vertical d’une centrale inertielle de référence (IRU) et le taux vertical du GNSS, à condition que le système hybride ait été testé et approuvé pour fournir une sortie de taux vertical avec une précision au moins aussi bonne que les sources de taux vertical barométrique (telles que TSO-C106). Le taux vertical hybride peut provenir d’un système de gestion de vol (FMS), d’un système de référence inertielle anémobarométrique (ADIRS) ou d’un IRU. L’équipement ADS-B doit transmettre les solutions de taux verticaux hybrides en tant que taux verticaux barométriques.
- b) Source de taux vertical mixte - Le taux vertical peut être obtenu à partir d’un système mixte qui filtre le taux vertical de centrale inertielle de référence (IRU) et le taux vertical barométrique, à condition que le système mixte ait été testé et approuvé pour fournir une sortie de taux vertical avec une précision au moins aussi bonne que les sources de taux vertical barométrique (telles que TSO-C106). Le taux vertical mixte peut provenir d’un FMS, d’un ADIRS ou d’une IRU. L’équipement ADS-B doit transmettre les solutions de taux verticaux mixtes en tant que taux verticaux barométriques.
- c) Source de taux vertical barométrique - Le taux vertical barométrique peut être obtenu à partir d’un calculateur de données aérodynamiques satisfaisant aux exigences minimales de performance de toute révision de la TSO-C106 ou d’un instrument de mesure de la vitesse verticale satisfaisant aux exigences minimales de performance des révisions applicables de la TSO-C8, Vertical Velocity Instruments (Rate-of-Climb). Nous vous recommandons d’utiliser toute révision d’un calculateur de données aérodynamiques conforme à l’instruction technique normalisée TSO-C106 si vous créez une interface entre le taux vertical barométrique et l’équipement ADS-B Émission.
- d) Source de taux vertical du GNSS - Le taux vertical géométrique peut provenir de toute révision des TSO-C129, TSO-C145, TSO-C146 ou TSO-C196 relatives à l’équipement GNSS si la source de position a été qualifiée pour fournir le taux vertical conformément à l’annexe B de la présente CI. Ne créez pas d’interface avec la vitesse verticale GNSS si l’équipement n’a pas été qualifié conformément à l’annexe B.
- e) Source de taux vertical inertiel - La vitesse verticale provenant d’un capteur inertiel qui n’est pas mélangée à l’altitude barométrique ne doit pas être transmise par le système ADS-B.
- f) Source d’altitude barométrique - Les systèmes ADS-B ne doivent pas dériver un taux d’altitude barométrique en échantillonnant les mesures d’altitude barométrique. Cela pourrait créer des informations erronées sur la vitesse verticale. Si le taux vertical barométrique n’est pas disponible, utilisez le taux vertical géométrique.
3) Directives d’installation - Le champ du taux vertical peut être rempli avec le taux vertical barométrique ou le taux vertical géométrique. Il n’est pas nécessaire d’interfacer plusieurs sources de vitesse verticale. Nous vous recommandons d’utiliser le schéma de priorité suivant lors de la sélection ou de l’interfaçage de plusieurs sources de taux vertical :
- a) Taux vertical hybride ou taux vertical mixte.
- b) Taux vertical barométrique.
- c) Taux vertical INSS.
4) Configuration des paramètres associés - Cette section fournit des directives supplémentaires sur la configuration des principaux paramètres ADS-B Émission en lien avec le taux vertical :
- a) Taux vertical - paramètre facultatif - S’il est disponible, interfacez le taux vertical d’une ou de plusieurs des sources énumérées au paragraphe (2) ci-dessus. Veillez à ce que la source fournisse la vitesse verticale en pieds par minute ou que l’équipement ADS-B peut reconnaître la base de la vitesse verticale et la convertir en pieds par minute.
- b) Source de taux vertical - paramètre facultatif - S’il est disponible, le bit source pour le taux vertical doit être codé comme barométrique en cas d’utilisation d’un taux barométrique provenant d’un calculateur de données aérodynamiques, ou en cas d’utilisation d’un taux vertical mixte ou hybride. Le bit source pour le taux vertical ne doit être codé comme géométrique qu’en cas d’utilisation d’un taux vertical provenant d’une source GNSS.
5.10 Considérations air-sol
1) Code de longueur et de largeur - Le code de longueur et de largeur est requis par la section 551.103 du chapitre 551 du MN et n’est transmis que dans le message de position de gouverne. Ainsi, pour se conformer à la règle, l’aéronef doit automatiquement déterminer son état air-sol et transmettre le message de position de gouverne, qui comprend le code de longueur et de largeur, lorsqu’il est au sol.
2) État air-sol - Pour les aéronefs équipés d’un train d’atterrissage rétractable, la détermination de l’état air-sol est généralement assurée par les microcontacteurs du train d’atterrissage. Pour les aéronefs équipés d’un train fixe, le système ADS-B doit toujours être en mesure de déterminer l’état air-sol de l’aéronef. Les installations qui fournissent un moyen de déterminer automatiquement l’état air-sol sur la base des données fournies par d’autres capteurs d’aéronefs peuvent être acceptées s’il peut être démontré qu’elles détectent l’état avec précision. Par exemple, l’état air-sol peut être dérivé des microcontacteurs de train d’atterrissage et de la vitesse GPS; ou de la vitesse GPS, d’une base de données aéroportuaire et de l’altitude géométrique; ou de la vitesse GPS et de la vitesse aérienne. Ces algorithmes doivent être testés et validés lors de l’approbation de l’installation.
Remarque 1: Nous recommandons que toute détermination air-sol automatique soit plus robuste qu’une simple comparaison de la vitesse-sol à une valeur seuil unique. L’expérience sur le terrain a montré que cette méthode peut créer des états air-sol erronés.
Remarque 2: La sélection manuelle de l’état air-sol n’est pas acceptable.
Remarque 3: Pour fournir un état air-sol précis, les giravions peuvent nécessiter une logique particulière. Une méthode fiable pour déterminer l’état air-sol devrait prendre en compte les besoins en matière de formation. Les giravions peuvent considérer la circulation près du sol comme étant une circulation aérienne.
3) Inhibition du transpondeur de mode S - TSO-C112d et TSO-C112e, Air Traffic Control Radar Beacon System/Mode Select (ATCRBS/Mode S) Airborne Equipment, exigent que les transpondeurs de mode S inhibent la réponse aux interrogations d’appel global de mode A/C/S et d’appel global de mode S uniquement en surface. Les transpondeurs de mode S dotés de la fonctionnalité ADS-B resteront désormais activés « ON » pendant les opérations de surface; il est donc impératif de s’assurer que l’interface du transpondeur avec l’état air-sol est correctement installée et que le transpondeur ne répond pas aux interrogations d’appel global de mode A/C/S ou d’appel global de mode S uniquement à la surface.
Remarque : Lors du déploiement du radar de surveillance des mouvements de surface version X (ASDE-X) dans divers aéroports, nous avons trouvé des installations de transpondeurs qui avaient été mal câblées et qui répondaient donc de manière inappropriée aux interrogations de l’ATC et du TCAS lorsqu’ils se trouvaient en surface à l’aéroport.
5.11 Exigences relatives à l’espace aérien étranger
1) Paramètres facultatifs - Si des opérations sont prévues dans un pays qui exige des paramètres non obligatoires au Canada, comme la capacité ADS-B Réception ou l’identification de position spéciale, suivez les directives d’installation du fabricant de l’équipement ADS-B pour interfacer ces paramètres. Le Tableau 23 de l’annexe D montre une comparaison entre les paramètres requis par TCAC, la FAA et/ou l’AESA.
6.0 Moyens de conformité
6.1 Vue d’ensemble des moyens de conformité
1) Pour l’approbation des installations, la sous-section 551.103(c)(3) du chapitre 551 du MN exige que les demandeurs démontrent la conformité de l’équipement à l’une des classes A1, A2, A3, B1, A1S ou B1S de l’instruction technique normalisée TSO-C166, révision b ou ultérieure; et la sous-section 551.103(d)(4) exige que les demandeurs démontrent la conformité des installations d’antennes à la section 3.3 de la norme RTCA/DO-260B, avec une exigence supplémentaire pour les installations à antenne unique (classes A1S et B1S) selon laquelle l’équipement transmet de manière satisfaisante vers les récepteurs terrestres et spatiaux.
2) Les installations à antennes multiples (classes A1, A2, A3 ou B1) sont préférables aux installations à antenne unique (classes A1S et B1S). Les moyens de conformité au paragraphe 3.3.4.6 « Installed Equipment Antenna System » de la norme RTCA/DO-260B sont bien établis et disponibles depuis 2011 et il a été démontré que ce choix d’architecture de système émet de manière adéquate vers les récepteurs spatiaux (SB) et terrestres (GB). Un essai limité suffira à démontrer la conformité de ce type d’installation.
3) Les installations à antenne unique positionnent principalement l’antenne sur la partie inférieure du fuselage, en vue d’une émission dans un seul hémisphère (inférieur) vers des récepteurs terrestres ou d’autres aéronefs volant à proximité. Consultez la Figure 3 pour voir un diagramme des hémisphères supérieur et inférieur.
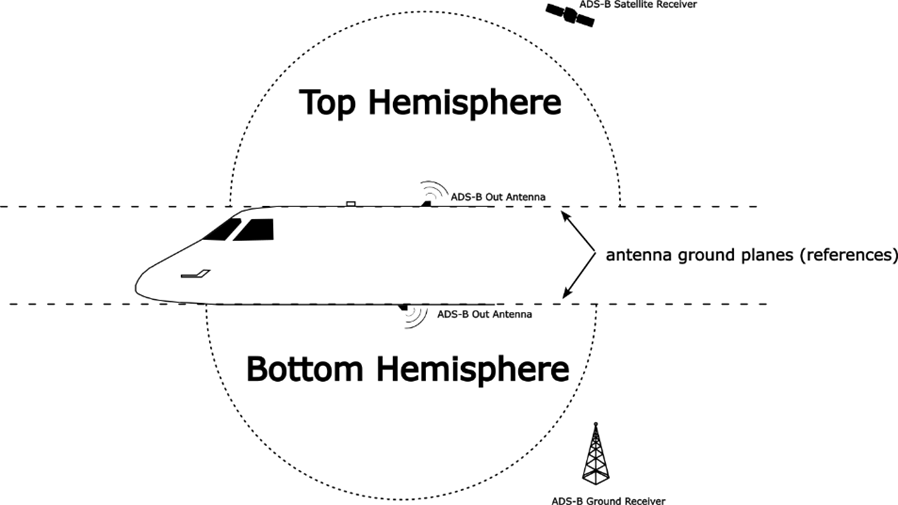
Figure 3 - Hémisphères de transmission supérieur et inférieur – Antennes diverses
4) Les antennes installées dans l’hémisphère inférieur ne peuvent généralement pas transmettre de manière satisfaisante vers les récepteurs SB. Le type d'antenne prédominant utilisé dans ces installations est le monopôle adapté 1/4 d'onde, qui a un diagramme d'émission prédominant vers l'hémisphère au-dessus du plan du sol. Toutefois, d’autres types d’installations d’antennes peuvent permettre d’obtenir des performances adéquates pour les récepteurs GB et SB, c.-à-d. une antenne dipôle unique avec une vue claire des deux hémisphères, des antennes multiples fonctionnant en réseau, etc. Pour ces types d’installations non diversifiées, la démonstration des performances du système est le moyen de conformité acceptable privilégié. Pour plus de clarté, consultez le diagramme d’une installation d’antenne unique idéale capable d’émettre vers les deux hémisphères de la Figure 4.
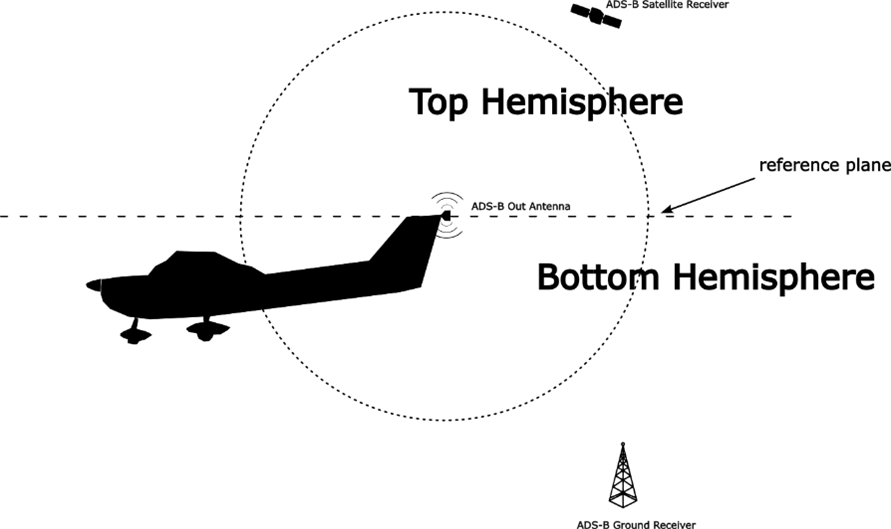
Figure 4 - Hémisphères de transmission supérieur et inférieur – Antenne unique
5) Le Tableau 7 est un résumé des moyens de conformité acceptés qui sont décrits dans la présente CI. De plus amples détails seront fournis dans les sections subséquentes.
| Nombre d’antennes |
2 |
1 |
1 |
1 |
2 ou plus |
|---|---|---|---|---|---|
|
Antennes diverses? |
Oui |
S.O. |
S.O. |
S.O. |
Non |
|
Positionnement |
supérieur et inférieur |
supérieur |
inférieur |
autre |
autre |
|
Classe DO-260B |
A1, A2, A3, B1 |
A1S, B1S |
A1S, B1S |
A1S, B1S |
S.O. |
|
Essai de base au sol |
Oui (conformément à la section 6.2) |
Oui (conformément à la section 6.2) |
Oui (conformément à la section 6.2) |
Oui (conformément à la section 6.2) |
Oui (conformément à la section 6.2) |
|
Essai en vol de performance d’antenne au sol |
Non |
Oui (conformément à la section 6.3) |
Oui (conformément à la section 6.3) |
Oui (conformément à la section 6.3) |
Oui (conformément à la section 6.3) |
|
Essai de bout en bout (DAPR) |
Oui (conformément à la section) |
Oui (conformément à la section) |
Oui (conformément à la section) |
Oui (conformément à la section) |
Oui (conformément à la section) |
6.2 Essais de base au sol
1) Les essais de base au sol décrits dans cette section doivent être effectués pour démontrer que le système remplit la fonction prévue en tenant compte de chacun des systèmes d’interface et que seule la transmission correcte de l’information est transmise.
REMARQUE IMPORTANTE : Les transmissions aériennes peuvent interférer avec l’ATC, en particulier avec d’autres aéronefs équipés de l’ADS-B se trouvant dans le rayon d’action. Coordonnez avec l’ATC avant la diffusion pendant les tests, si d’autres moyens de blocage des signaux ne sont pas utilisés.
2) Latence du système - La latence est traitée par l’analyse plutôt que par les essais. Veuillez consulter l’annexe C de la présente CI.
3) Performance en matière de précision et d’intégrité - Veillez à ce que le système installé soit conforme à la performance en matière de précision et d’intégrité annoncée dans les conditions d’exploitation prévues. Nous vous recommandons d’effectuer une prédiction de performance GNSS pour la période applicable de votre essai afin de vous assurer que le système ADS-B est conforme à la performance prévue. En l’absence de performance GNSS prévue, démontrez que toutes les exigences de la sous-section 551.103 (d)(2) du chapitre 551 du MN sont satisfaites, telles qu’elles sont énumérées au
| Paramètre |
Performance minimale en matière de précision et d’intégrité |
|---|---|
|
NIC ≥ 7 |
Limite du rayon de confinement horizontal : |
|
NACP ≥ 8 |
95 % Limite de précision horizontale : |
|
NACV ≥ 1 |
Erreur de vitesse horizontale : |
|
SIL = 3 |
Probabilité de dépassement du rayon de confinement NIC : |
|
SDA ≥ 2 |
Probabilité d’une défaillance non détectée entraînant la transmission d’informations fausses ou trompeuses : |
4) Paramètres - Conformément à la sous-section 551.103(d)(1) du chapitre 551 du MN, il convient de veiller à ce que les paramètres suivants soient correctement renseignés et transmis :
|
Paramètre |
|
|---|---|
|
1 |
Adresse d’aéronef 24 bits de l’Organisation de l’aviation civile internationale (OACI); |
|
2 |
Position horizontale de la surface (latitude et longitude); |
|
3 |
IDENT du transpondeur en cours d’utilisation; |
|
4 |
État d’urgence/de priorité; |
|
5 |
Identification de l’aéronef (Numéro/marque d’identification de vol ou d’immatriculation de l’aéronef); |
|
6 |
Position horizontale en vol (latitude et longitude); |
|
7 |
Altitude-pression barométrique; |
|
8 |
Catégorie d’émetteur ADS-B; |
|
9 |
Altitude géométrique (hauteur GNSS); |
|
10 |
Vitesse horizontale (en vol et au sol) |
|
11 |
Longueur et largeur de l’aéronef; |
|
12 |
Code de mode A; |
|
13 |
Catégorie d’intégrité de navigation (NIC); |
|
14 |
Catégorie de précision de navigation pour la position (NACP); |
|
15 |
Catégorie de précision de navigation pour la vitesse (NACV); |
|
16 |
Niveau d’intégrité de source (SIL); |
|
17 |
Assurance de la conception du système (SDA); |
|
18 |
Numéro de version MOPS; |
|
19 |
TCAS installé et opérationnel; |
|
20 |
État du trafic TCAS (si installé); |
|
21 |
Altitude sélectionnée (si elle est disponible dans un format approprié); et |
|
22 |
Réglage de la pression barométrique (si elle est disponible dans un format approprié). |
Remarque : Les paramètres facultatifs ou autres paramètres non énumérés au Tableau 9 qui sont choisis par le demandeur pour faire partie de la transmission doivent être transmis avec la valeur correcte. Dans le cas contraire, ces paramètres doivent être supprimés de la transmission. Par exemple, le document CS-ACNS de l’AESA définit le paramètre « décalage de l’antenne GNSS » comme obligatoire. Si le demandeur choisit d’inclure ce paramètre, sa valeur doit être la valeur réelle du décalage de l’antenne GNSS.
5) Précision de la position - Positionnez l’aéronef sur un site étudié et validez la position transmise par le système ADS-B. Veillez à ce que la position transmise se situe dans la limite de précision NACP autorisée. Par exemple, si l’aéronef signale un NACP = 8, la position ADS-B devrait se situer à 92,6 mètres (0,05 nm). Si l’aéronef signale un NACP = 10, la position ADS-B devrait se situer à moins de 10 mètres. Consultez le Tableau 14 dans l’annexe A de cette CI pour une liste complète des valeurs NACP. Si la précision de la position transmise est inférieure ou égale à la résolution de l’équipement d’essai, il est acceptable d’utiliser plus ou moins un bit de poids faible comme critère de réussite ou d’échec.
6) Précision de l’altitude barométrique - Validez que l’altitude barométrique transmise par le système ADS-B est précise à 125 pieds près et correspond à l’altitude barométrique signalée par le transpondeur.
7) Essais d’interface électromagnétique (EMI)/compatibilité électromagnétique (EMC) - Fournissez un plan d’essai EMI/EMC qui démontre la conformité avec la section 523.2510, les sous-sections 525.1353(a) et (b), 525.1431(a) et (c), les sections 527.1301, 527.1309, les sous-sections 529.1353(a) et (b), et 529.1431(a) et (b) des manuels de navigabilité respectifs, le cas échéant. Réalisez des essais EMI/EMC pour s’assurer que l’équipement ADS-B ne constitue pas une source d’interférence pour les autres systèmes installés sur l’aéronef. En outre, il vous faut veiller à ce que les équipements déjà installés dans l’aéronef n’interfèrent pas avec le système ADS-B. Si le STC ou le TC n’implique qu’une modification logicielle vers une installation de transpondeur de mode S approuvée et que la mise à jour logicielle n’affecte pas la réponse du système aux interférences électromagnétiques, il n’est pas nécessaire d’effectuer à nouveau des essais d’interférences électromagnétiques.
8) Interface homme-machine - Évaluez l’interface de l’équipage de conduite pour le système ADS-B Émission, y compris l’interface homme-système et le comportement du système. Le système ADS-B Émission doit être compatible avec les caractéristiques générales de conception du poste de pilotage (telles que l’accès aux commandes, la lisibilité de la lumière du soleil, l’éclairage de nuit, etc.), ainsi qu’avec l’environnement de l’aéronef (notamment, les vibrations).
9) Affichage d’information - Évaluez le système ADS-B Émission pour veiller à ce que les informations affichées soient facilement et clairement discernables et que leur luminosité, leur taille et leur contraste visuel sont suffisants pour que les pilotes puissent les voir et les interpréter. Veillez à ce que les pilotes aient une vue claire, dégagée et non déformée des éléments d’information affichés. Veillez à ce que les éléments d’information soient distincts et permettre aux pilotes de déterminer la source des éléments d’information si nécessaire, lorsqu’il existe plusieurs sources du même type d’information.
10) Commandes et étiquetage - Évaluez les commandes de l’interface pilote pour s’assurer qu’elles sont clairement identifiées quant à leur fonction prévue, qu’elles sont faciles à utiliser et qu’elles empêchent toute confusion et tout fonctionnement involontaire du système ADS-B et des autres systèmes avec lesquels elles interagissent. Évaluez les acronymes, les étiquettes et les annonces pour vous assurer qu’ils soient utilisés de manière cohérente dans le poste de pilotage et qu’ils ne sont pas source de confusion ou d’erreurs. Si un contrôle remplit plus d’une fonction, évaluez les étiquettes pour vous assurer qu’elles incluent toutes les fonctions prévues, à moins que la fonction du contrôle ne soit évidente. Lors de l’évaluation, il convient de prendre en compte les touches de sélection de ligne, les écrans tactiles ou les dispositifs contrôlés par le curseur (tels que les boules de commande), car ils peuvent être susceptibles de sélectionner un mode involontaire en raison de leur emplacement dans le poste de pilotage (par exemple, à proximité d’un repose-pieds ou d’une zone de rangement temporaire).
11) Annonces et alertes - Évaluez toutes les annonces et alertes ADS-B, vous assurant qu’elles sont claires et sans ambiguïté et qu’elles attirent l’attention et sont adaptées au type d’alerte. La conformité aux AC 25.1322-1, Flight crew Alerting, à l’AC 27.1322 (dans l’AC 27-1B, Certification of Normal Category Rotorcraft de la FAA) et 29.1322 (dans l’AC 29-2C, Certification of Transport Category Rotorcraft de la FAA) de la FAA doit être prise en compte lors de l’évaluation des annonces et alertes ADS-B. Les couleurs jaune/ambre et rouge devraient être réservées aux mises en garde et aux avertissements, respectivement. Évaluez les annonces et les indications pour s’assurer qu’elles sont pertinentes d’un point de vue opérationnel et limitées pour minimiser les effets négatifs sur la charge de travail de l’équipage de conduite. Lorsqu’une annonce est fournie pour l’état ou le mode d’un système, il est recommandé que l’annonce indique l’état réel du système, et pas seulement la position d’un commutateur. Il convient de noter que tout indicateur de défaillance affiché sur l’écran principal de vol (PFD) doit être considéré comme faisant partie de la fonction d’alerte.
12) Erreurs d’interface pilote - Les installations qui ne fournissent pas un point d’entrée unique pour l’ADS-B et le transpondeur pour le code mode 3/A, l’IDENT et l’état d’urgence doivent procéder à une évaluation des commandes de l’interface pilote afin de déterminer si elles sont conçues pour minimiser les erreurs d’entrée par l’équipage de conduite et permettre à l’équipage de conduite de détecter et de corriger les erreurs qui se produisent. La conception de l’interface système doit également être évaluée pour s’assurer que la double saisie du code de mode 3/A, de l’IDENT et de l’état d’urgence n’entraîne pas une charge de travail supplémentaire importante et que les commandes sont acceptables pour la saisie des données, la précision et les taux d’erreur, en particulier lors de la communication d’une situation d’aéronef en état d’urgence. Les évaluations doivent prendre en compte les taux d’erreurs détectées et non détectées par les pilotes, la charge de travail des pilotes et les temps de formation. Consultez la section 6.2 pour de plus amples informations sur le point d’entrée unique des transpondeurs et des systèmes ADS-B.
13) Éclairage - Évaluez toutes les conditions prévisibles relatives à l’éclairage, y compris les modes de défaillance tels que les pannes d’éclairage et de système d’alimentation, et les opérations de jour et de nuit.
14) Essai de régression de transpondeur - Au minimum, utilisez les procédures décrites dans l’AC 43-6(), Altitude Reporting Equipment and Transponder System Maintenance and Inspection Practices de la FAA pour valider que le transpondeur fonctionne normalement après l’installation de l’ADS-B. Utilisez les procédures décrites dans l’AC 20-151() de la FAA pour les systèmes ADS-B qui incluent l’installation d’un transpondeur de Mode S nouveau ou modifié. Si vous installez une nouvelle capacité d’état air-sol pour le système ADS-B et que cette fonctionnalité est également interfacée avec le transpondeur, vous devez vous assurer que les réponses aux interrogations d’appel global de mode A/C et ATCRBS/mode S sont inhibées au sol.
15) Adresse 24 bits OACI - Dans le cas d’un aéronef civil canadien, démontrez que l’adresse 24 bits transmise par le système ADS-B Émission est en corrélation avec la marque de l’aéronef et correspond à l’adresse 24 bits transmise par le mode S. Si l’aéronef est équipé d’un système ADS-B UAT séparé, assurez-vous que les deux systèmes transmettent la même adresse 24 bits OACI. Dans le cas d’un aéronef non immatriculé au Canada, vérifiez que l’adresse 24 bits OACI correspond à l’adresse attribuée à l’aéronef par l’autorité compétente de l’État.
16) Autodiagnostic - Évaluez les fonctions d’autodiagnostic de l’ADS-B (le cas échéant) et les annonces de mode de défaillance pour s’assurer que le pilote est en mesure de déterminer si le système fonctionne correctement.
17) Défaillance de la source de position - Démontrez qu’une défaillance ou une perte de la source de position entraîne l’indication à l’exploitant d’une défaillance de la fonction ADS-B. Si une source de position secondaire est interfacée avec l’équipement ADS-B, il faut s’assurer qu’elle est conforme à toutes les directives de la présente CI. Si le passage de la source de position primaire à la source de position secondaire nécessite un changement de SIL ou de SDA, assurez-vous que ces changements sont effectués dans les 12 secondes.
18) État air-sol - Vérifiez que les entrées (ou algorithmes) air-sol fonctionnent correctement et que le système ADS-B transmet les messages embarqués ou les messages de gouverne appropriés en fonction de l’état air-sol. Cette opération peut être réalisée à l’aide d’entrées simulées dans les capteurs appropriés ou en conjonction avec l’essai en vol. Les giravions peuvent considérer la circulation près du sol comme étant une circulation aérienne.
19) TCAS/ACAS - Si un système TCAS II/ACAS II est installé sur l’aéronef, assurez-vous que les messages appropriés sont transmis par le système ADS-B lorsque le TCAS/ACAS est activé et qu’il fonctionne dans un mode permettant de fournir des AR. Aucun essai de régression du système TCAS/ACAS n’est requis en dehors des essais de l’interface au sol couverts dans la présente section.
20) Inhibition d’appel global du transpondeur - Démontrer que le code de mode 3/A et l’IDENT corrects sont transmis. Ne transmettez pas les codes d’urgence 7500, 7600 ou 7700 par voie aérienne pendant les essais au sol ou en vol. Si vous souhaitez tester des codes d’urgence, contactez l’installation ATC locale et coordonnez les essais afin d’éviter une intervention d’urgence pour nuisance.
21) Puissance d’émission - La puissance d’émission doit être testée si une nouvelle antenne a été installée, si une antenne existante a été déplacée, si un diplexeur a été installé dans un système d’antenne existant ou si les spécifications de sortie du transpondeur ont été modifiées. Effectuez les essais suivants pour valider la puissance d’émission :
- a) Vérifiez que la puissance d’impulsion de crête à l’extrémité antenne de la ligne de transmission respecte les niveaux de puissance minimum et maximum résumés dans le Tableau 10, en tenant compte du gain d’antenne de l’équipement d’essai et de l’affaiblissement de propagation.
- Remarque: La mise à niveau d’un transpondeur TSO-C112() de mode S précédemment installé et approuvé pour inclure la fonctionnalité ADS-B ne nécessite pas d’essai de puissance d’émission, sauf si une nouvelle antenne a été installée, si l’emplacement de l’antenne a changé ou si les spécifications de sortie du transpondeur ont été modifiées.
Tableau 10 - Puissance d’émission minimale et maximale (d’après TSO-C166b) Classe d’émetteur à l’essai Puissance minimale
Puissance maximale
A1
21,0 dBW (125 W)
27,0 dBW (500 W)
A1S
21,0 dBW (125 W)
27,0 dBW (500 W)
B1
21,0 dBW (125 W)
27,0 dBW (500 W)
B1S
21,0 dBW (125 W)
27,0 dBW (500 W)
A2
21,0 dBW (125 W)
27,0 dBW (500 W)
A3
23,0 dBW (200 W)
27,0 dBW (500 W)
6.3 Essais de performances d’antenne au sol
1) Afin de réduire le fardeau de démonstration de la conformité pour les demandeurs, la présente CI établit une distinction entre les types d’installation afin d’utiliser autant que possible les données des systèmes déjà approuvés.
2) Comme le montre le Tableau 7, la première grande distinction est faite entre les demandeurs qui souhaitent obtenir l’autorisation d’installer un système ADS-B Émission sur un aéronef qui dispose déjà d’un système de transpondeur de mode S approuvé conformément aux exigences minimales de la TSO-C112(), lorsque cet émetteur de transpondeur et ces antennes approuvés seront utilisés pour diffuser les messages ADS-B Émission.
3) Pour les aéronefs qui ne disposent pas d’une installation de transpondeur de mode S approuvée et qui demandent une approbation simultanée avec le système ADS-B Émission, le demandeur peut suivre les orientations de l’AC 20-151() de la FAA comme moyen acceptable de mise en conformité.
4) La distinction suivante est faite entre les systèmes avec et sans diversité. La sous-section 551.103(c)(3) du chapitre 551 du MN exige que les demandeurs démontrent la conformité de l’équipement à l’une des classes A1, A2, A3, B1, A1S ou B1S de l’instruction technique normalisée TSO-C166, révision b ou ultérieure; et la sous-section 551.103(d)(4) exige que les demandeurs démontrent la conformité des installations d’antennes à la section 3.3 de la norme RTCA/DO-260B, avec une exigence supplémentaire pour les installations à antenne unique (classes A1S et B1S) selon laquelle l’équipement transmet de manière satisfaisante vers les récepteurs terrestres et spatiaux.
5) Les systèmes avec diversité d’antennes sont préférables car les transmissions se font à pleine puissance, en alternance sur les antennes supérieure et inférieure, ce qui maintient les capacités de longue portée et permet aux messages ADS-B d’atteindre les récepteurs terrestres et satellitaires. Les systèmes avec diversité d’antennes ne seront pas tenus de démontrer la performance de l’antenne par les essais décrits dans la présente section 6.3.
6) Les systèmes dotés d’une seule antenne ou d’un réseau d’antennes sans diversité devront présenter une puissance rayonnée équivalente à celle d’un système avec diversité. La définition suivante du gain d’émission acceptable minimal est tirée de la norme DO-260B :
- Le gain d’une antenne d’émission omnidirectionnelle n’est pas inférieur au gain d’une antenne quart d’onde secondaire appariée moins 3 dB sur 90 pour cent du volume de couverture de 0 à 360 degrés en azimut et de 5 à 30 degrés au-dessus du plan de sol, lorsqu’elle est installée au centre d’un plan de sol circulaire plat de 1,2 m de diamètre (ou plus).
7) Ces critères seront appliqués aux hémisphères inférieur et supérieur autour de l’aéronef, comme si deux antennes quart d’onde secondaires étaient montées en configuration miroir. Pour les installations à antenne dipôle unique, le plan de référence pour les deux hémisphères sera le plan horizontal situé au milieu de l’antenne. Voir la Figure 4. Pour les installations de réseaux d’antennes sans diversité, les plans de référence seront similaires à ceux d’un système avec diversité. Voir la Figure 3.
8) Le gain d’antenne minimal acceptable, associé à la puissance minimale acceptable à la borne d’antennes conformément aux classes d’émetteurs de la norme DO-260B, définit la puissance apparente rayonnée (PAR) minimale pour le système installé.
9) Pour déterminer la PAR du système installé, suivez la procédure décrite au paragraphe 3.3.4.6.1 de la DO-260B, sauf que pour les mesures sur l’hémisphère inférieur, il n’est pas nécessaire d’élever l’aéronef si le point de mesure est au-dessous du sol. Il suffira de mesurer au niveau du sol. Voir la Figure 5.
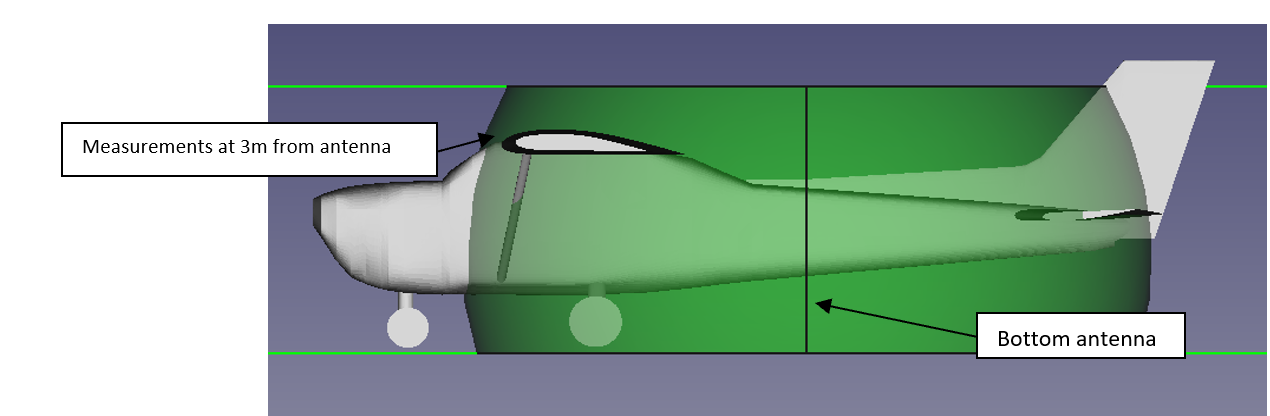
Figure 5 - Plans de mesure de la PAR
10) L’aéronef doit être aussi éloigné que possible des constructions métalliques, afin de minimiser l’effet des réflexions. Une rose des vents à compensation serait l’emplacement idéal.
11) Vous devez vous coordonner avec l’ATC avant d’effectuer des transmissions par ondes hertziennes.
12) Suivez les étapes 1 à 10 du paragraphe 3.3.4.6.1 Verification of Transmit Pattern Gain de la DO-260B. Si, aux étapes 8, 9 ou 10, le point de mesure se trouve en-dessous du sol, il suffit de mesurer au niveau du sol et il n’est pas nécessaire d’effectuer des mesures à des angles d’élévation plus importants pour l’hémisphère inferieur. Les critères de réussite ou d’échec sont indiqués à chaque étape.
6.4 Essai en vol de bout en bout
1) Cette section fournit des informations sur les essais en vol des systèmes ADS-B afin de vérifier que le système de Nav Canada reçoit correctement les messages de diffusion ADS-B de l’aéronef, que les pertes se situent dans les valeurs statistiques maximales acceptables et que les informations transmises sont complètes et correctes. Actuellement, la seule méthode disponible pour réaliser l’essai en vol consiste à voler dans la zone de couverture du service ADS-B SB et à effectuer une analyse des données reçues de Nav Canada après le vol.
Remarque 1: Cet essai en vol est destiné à compléter une approbation de conception dans le cadre d’une application STC ou TC;
Remarque 2: Suivez votre procédure habituelle de demande d’autorisation d’essai en vol; il n’y a pas d’exigences particulières en matière d’autorisation d’essai en vol pour les essais en vol ADS-B.
2) Brouillage électromagnétique - Pendant toutes les phases de vol, étudiez le brouillage électromagnétique dans le poste de pilotage afin de déterminer si l’équipement ADS-B Émission n’est pas une source de brouillage rayonné ou par conduction indésirable avec des systèmes ou des équipements précédemment installés, et si le fonctionnement de l’équipement ADS-B Émission n’est pas affecté par un brouillage par conduction ou rayonné provenant de systèmes et d’équipements précédemment installés.
3) Performances des autres systèmes - Démontrez les bonnes performances de tous les systèmes précédemment installés sur l’aéronef qui ont dû être modifiés à la suite de l’installation de l’ADS-B, conformément à la politique applicable. Cela peut être réalisé au moyen de procédures d’essai de régression standard pour les autres systèmes installés précédemment installés.
4) Interface utilisateur - Faites l’essai de toutes les entrées de l’utilisateur. Si des entrées utilisateur distinctes sont nécessaires pour le transpondeur et le système ADS-B, évaluez les procédures du manuel de vol pour veiller à ce que le même code de mode 3/A, l’IDENT et les codes d’urgence sont transmis par les deux systèmes.
5) Emplacement/Horaire du vol et état des systèmes - Le vol peut être effectué dans tout espace aérien jugé adéquat par NAV Canada pour les essais en vol. Il convient de noter que les pannes ou les performances insuffisantes des systèmes spatiaux, dues à la maintenance programmée ou à d’autres conditions ad hoc telles que les tempêtes de vent solaire ou zones encombrées, influenceront directement les résultats des essais en vol. Il est recommandé d’effectuer une prédiction de la performance du GNSS pour la durée applicable de votre essai, et ce avant l’essai en vol. En raison de la conception des récepteurs GNSS existants et des configurations typiques des constellations de satellites, il y aura des périodes pendant lesquelles les solutions GNSS non augmentées tomberont en dessous des performances NIC et NACP requises.
Remarque : Un seul satellite est capable de recevoir des signaux provenant d'une vaste étendue de territoire (plus de 1 000 x 1 000 km) et sera donc soumis à la transmission simultanée d'un grand nombre de messages ADS-B, en fonction de la densité du trafic. Dans ce cas, le nombre de messages valides correctement reçus et décodés par le système satellitaire peut être inférieur au nombre nominal et en fonction de la durée du vol (la quantité de messages diffusés est directement proportionnelle à la durée du vol), les données peuvent être insuffisantes pour déclarer fonctionnalité adéquate du système. Dans ce cas, un test en vol ultérieur pourra être demandé. Les essais en vol exécutés dans des conditions de densité de trafic plus faible seront moins soumis à ces conditions.
6) Profil d’essai en vol - Ce profil est destiné à être utilisé avec tous les systèmes ADS-B homologués. Le profil n’a pas besoin d’être suivi à la lettre, et des écarts pour les autorisations et vecteurs du contrôleur aérien sont acceptables. L’essai en vol doit durer au moins une heure. Le critère de réussite/échec étant basé sur des statistiques, les vols de longue durée bénéficieront du plus grand nombre de données reçues. Les profils décrits ci-dessous peuvent être exécutés dans n’importe quel ordre.
7) Altitude - Pilotez l’avion à plusieurs altitudes tout au long du vol, dans la portée de l’ADS-B. Aucune altitude maximale ou minimale n’est requise pour l’essai en vol.
8) Virages - Vérifiez que le système ADS-B fonctionne correctement pendant les manœuvres. Pendant le vol, placez l’aéronef dans diverses configurations normales telles que le décollage, l’approche, l’atterrissage et la configuration de croisière, si cela est approprié pour la cellule. Pendant le vol, effectuez au moins deux virages à gauche et deux virages à droite de 360 degrés. Le Tableau 11 , ci-dessous, indique l’altitude, la vitesse et l’angle d’inclinaison suggérés pour effectuer ces virages. L’objectif de cet essai est de s’assurer que le système ADS-B fonctionne correctement dans les conditions normales de vol de l’aéronef à l’essai. Les variations d’altitude, de vitesse et d’angle d’inclinaison sont acceptables tant que l’objectif de l’essai est respecté.
| MN, chapitre 523 - Aéronefs | ||
|---|---|---|
|
Configuration |
Plages de vitesses |
Angle d’inclinaison |
|
Décollage |
1,4 VS |
30° |
|
Approche ou atterrissage |
1,4 VS |
30° |
|
Croisière |
1,5 VS à 1,8 VS |
30° |
| MN, chapitre 525 - Aéronefs | ||
|
Configuration |
Plages de vitesses |
Angle d’inclinaison |
|
Décollage |
V2 + 20 kts |
30° |
|
Approche ou atterrissage |
VAPP + 20 kts |
30° |
|
Croisière |
1,5 VS à 1,8 VS |
30° |
| MN, chapitre 527 - Giravions | ||
|
Configuration |
Plages de vitesses |
Angle d’inclinaison |
|
Atterrissage |
VY + 10 kts |
30° |
|
Croisière |
0,8 VNE ou 0,8 VH |
30° |
| MN, chapitre 529 - Giravions | ||
|
Configuration |
Plages de vitesses |
Angle d’inclinaison |
|
Atterrissage |
VY + 10 kts |
30° |
|
Croisière |
0,8 VNE ou 0,8 VH |
30° |
9) Montées/descentes - Vérifiez que le système ADS-B fonctionne correctement pendant les montées et les descentes. Le Tableau 12 fournit une suggestion de vitesse à laquelle les montées doivent être effectuées pendant le vol d’essai. Le Tableau 13 fournit une suggestion de vitesse à laquelle les descentes doivent être effectuées pendant le vol d’essai. Les montées et les descentes doivent durer au moins une minute. L’objectif de cet essai est de s’assurer que le système ADS-B fonctionne correctement dans les conditions de vol de l’aéronef à l’essai. Les variations des taux de montée et de descente sont acceptables tant que l’objectif de l’essai est respecté.
| Configuration |
Partie 23 - Aéronefs |
Partie 25 - Aéronefs |
Partie 27 - Giravions |
Partie 29 - Giravions |
|---|---|---|---|---|
|
Décollage |
VY |
VFE - 10 kts |
VY |
VY |
|
Croisière |
VH |
VMO - 10 kts |
0,8 VNE ou 0,8 VH |
0,8 VNE ou 0,8 VH |
| Configuration |
Partie 23 - Aéronefs |
Partie 25 - Aéronefs |
Partie 27 - Giravions |
Partie 29 - Giravions |
|---|---|---|---|---|
|
Croisière |
VNE - 10 kts |
VMO - 10 kts |
0,8 VNE ou 0,8 VH |
0,8 VNE ou 0,8 VH |
|
Approche |
VFE - 10 kts |
VFE - 10 kts |
VY + 10 kts |
VY + 10 kts |
|
Atterrissage |
VFE - 10 kts |
VFE - 10 kts |
S.O. |
S.O. |
10) Analyse des données après le vol - Vous devez effectuer une analyse des données après le vol pour vous assurer que l’aéronef transmet les informations ADS-B avec précision. Demandez un rapport détaillé sur les performances de l’ADS-B (DAPR) à NAV Canada et veillez à ce que les données disponibles associées à la piste soient cohérentes, comme l’adresse 24 bits, l’immatriculation de l’aéronef, la catégorie de l’émetteur, l’identification du vol, l’altitude barométrique, le mode 3A, SIL, SDA, NIC et NACp. Demande par courriel à : service@navcanada.ca, avec l'objet du courriel suivant, en anglais : Request for Detailed ADS-B Performance Report
11) L’analyse des données après le vol doit également révéler s’il y a eu des pertes de données inattendues qui pourraient être dues à des interfaces de câblage intermittentes ou à une incompatibilité d’interface. Ceci peut être vérifié par la probabilité de mise à jour (PU) avec un intervalle de mise à jour de 5 secondes, valeur fournie dans le rapport DAPR de NAV Canada. Le PU minimum cible est de 96,5 %
12) La valeur PU est calculée à partir d’un modèle statistique et, par conséquent, les vols plus longs transmettent davantage de points de données, ce qui permet d’obtenir un résultat plus robuste. De plus, si l'on observe qu'une forte densité de trafic affecte les données collectées lors des essais en vol, une comparaison entre l'aéronef testé et d'autres aéronefs dotés d'installations ADS-B approuvées volant à proximité révélera des dissemblances et des problèmes d'installation potentiels. Cette analyse sera effectuée par NAV Canada et un résumé réussite/échec sera fourni au demandeur.
6.5 Réutilisation ultérieure des données
1) Les lignes directrices de cette CI s’appliquent aux demandes initiales de STC/TC. Les données d’essai (au sol ou en vol) provenant d’une installation similaire, couvertes par un précédent STC/TC, peuvent être utilisées au lieu d’un nouvel essai si les conditions suivantes peuvent être confirmées par la documentation du précédent STC :
- a) Équipement de la source de position - La source de position doit être identique à celle des autres documents de certificat de type modifié (ATC), TC ou STC. Les familles d’équipement qui utilisent la même conception de base peuvent construire un cas par analyse de similarité.
- b) Équipement ADS-B - L’équipement ADS-B doit être identique à celui des autres documents ATC/TC/STC. Les familles d’équipement qui utilisent la même conception de base peuvent construire un cas par analyse de similarité.
- c) Interface du système - Une interface directe doit être utilisée entre la source de position et l’équipement ADS-B, et cette interface doit être identique à celle de l’ATC/TC/STC précédent. Les aéronefs équipés de concentrateurs de données devront refaire le test, même si l’équipement est identique.
- d) Interface air-données - L’interface air-données de l’équipement ADS-B doit être identique à celle de l’ATC/TC/STC précédent. La source réelle des données aériennes peut être un équipement différent; seule l’interface avec l’équipement ADS-B doit être identique. Toutefois, si la source des données aériennes est différente, des essais au sol plus complets doivent être réalisés, notamment un essai dynamique au cours duquel la source de données aériennes simule des entrées allant du niveau de la mer à l’altitude maximale d’exploitation certifiée de l’aéronef. Il convient de veiller à ce que la diffusion d’informations sur l’altitude simulée ne provoque pas d’interférences avec les applications ATC ou ADS-B Réception.
- e) Interface de cap - L’interface de cap avec l’équipement ADS-B (le cas échéant) doit être identique à celle de l’ATC/TC/STC précédent. La source de cap peut être différente; seule l’interface avec l’équipement ADS-B doit être identique. Si la source de cap est différente, il convient de procéder à des essais, notamment en positionnant l’aéronef à plusieurs caps au sol pour vérifier la précision du cap.
- f) Interface TCAS - L’interface TCAS avec l’équipement ADS-B (le cas échéant) doit être identique à celle de l’ATC/TC/STC précédent. L’équipement TCAS peut être différent; seule l’interface avec l’équipement ADS-B doit être identique.
7.0 Historique du document
1) CI 500-029, édition 01, SGDDI 16965437 V5 (E), 17649431 V5 (F), DATÉE DU 22-04-2022 - Certification de surveillance dépendante automatique en mode diffusion (ADS-B)
8.0 Communiquez avec nous
1) On recommande aux personnes qui présentent une demande de modification d’aéronef de communiquer avec leur bureau régional de certification des aéronefs de TCAC afin de déterminer l’acceptabilité et l’exhaustivité des essais proposés avant d’effectuer l’essai en vol. Les ingénieurs et les délégués régionaux communiqueront avec le service des essais en vol de TCAC pour confirmer la nécessité d’effectuer une évaluation des essais en vol de l’aéronef modifié; il est recommandé de le faire rapidement.
Pour de plus amples renseignements, veuillez communiquer avec :
Normes de certification des aéronefs (AARTC)
Courriel : tc.aartcdaircraftdesignstandards-normesdeconceptiondesaeronefsaartcd.tc@tc.gc.ca
2) Nous vous invitons à nous soumettre toute proposition de modification au présent document. Veuillez soumettre vos commentaires au :
Centre des communications de l’Aviation civile :
https://tc.canada.ca/fr/aviation/contacts-bureaux-aviation-civile
Document original signé par Andrew Larsen pour
Stacey Mason
Directeur, Direction des normes
Aviation civile
Transports Canada
Annexe A - Description des éléments de message
1.0 But
1) La présente annexe décrit les éléments de message qui peuvent être contenus dans un message ADS-B Émission.
2.0 Éléments de message
1) Vitesse - En option, la vitesse vraie ou la vitesse indiquée peut être transmise. La source de vitesse doit être approuvée pour fournir des données de vitesse. Un calculateur de données aérodynamiques répondant aux exigences minimales de performance de la norme TSO-C106 est une source acceptable. Ne créez pas d’interface entre une source de vitesse et l’ADS-B qui n’a pas été approuvée pour l’affichage dans le cockpit.
2) Altitude-pression barométrique. Ce paramètre indique l’altitude-pression barométrique de l’aéronef par rapport à la pression standard au niveau de la mer de 29,92 pouces de mercure ou 1013,2 hectopascals. L’altitude-pression barométrique doit être transmise en vertu de la section 551.103 du chapitre 551 du MN.
3) Indicatif d’appel/identifiant de vol. L’expression « indicatif d’appel d’aéronef » est l’indicatif d’appel radiotéléphonique attribué à un aéronef à des fins de communications vocales. (Ce terme est parfois utilisé de manière interchangeable avec « identification de vol » ou « ID de vol »). Pour les aéronefs de l’aviation générale, l’indicatif d’appel de l’aéronef est normalement le numéro d’immatriculation national; pour les aéronefs des compagnies aériennes et les aéronefs de catégorie navette, l’indicatif d’appel est généralement composé de l’identification de la compagnie et du numéro de vol (et n’est donc pas lié à une cellule particulière) et, pour les militaires, il est généralement composé de nombres et de mots de code ayant une signification particulière pour l’opération menée. L’indicatif d’appel ou le numéro d’immatriculation de l’aéronef doit être transmis conformément à la section 551.103 du chapitre 551 du MN.
4) État d’urgence. Ce paramètre avertit l’ATC que l’aéronef est en situation d’urgence et indique le type d’urgence. Les codes d’urgence applicables figurent dans les dispositions de l’OACI (annexe 10, volume 4) intitulées Surveillance Radar and Collision Avoidance Systems. Cette information alerte l’ATC d’un danger potentiel pour l’aéronef afin qu’il puisse prendre les mesures qui s’imposent. L’état d’urgence doit être transmis en vertu de la section 551.103 du chapitre 551 du MN.
5) Catégorie d’émetteurs. La catégorie d’émetteurs donne une indication de la taille de l’aéronef et de ses capacités de performance. Les catégories d’émetteurs sont définies dans l’instruction technique normalisée TSO-C166b. La catégorie d’émetteurs est conçue principalement pour fournir des informations sur les turbulences de sillage produites par un aéronef. La catégorie d’émetteurs doit être transmise en vertu de la section 551.103 du chapitre 551 du MN.
6) Altitude géométrique. L’altitude géométrique est une mesure d’altitude fournie par un service de positionnement par satellite et n’est pas affectée par la pression atmosphérique. L’altitude géométrique n’est disponible qu’avec une source de position GNSS. L’altitude géométrique pour les besoins de l’ADS-B est la hauteur au-dessus de l’ellipsoïde (HAE) du système géodésique mondial - 1984 (WGS-84). L’altitude géométrique doit être transmise en vertu de la section 551.103 du chapitre 551 du MN.
7) Précision géométrique verticale (GVA). La GVA indique la précision à 95 % de la position verticale signalée (altitude géométrique) à l’intérieur d’une tolérance associée.
8) Décalage d’antenne GNSS et décalage de position appliqué (POA) - Le décalage d’antenne GNSS indique la distance longitudinale entre la partie la plus avancée de l’aéronef et l’antenne GNSS, et la distance latérale entre l’axe longitudinal de l’aéronef et l’antenne GNSS. Reportez-vous également à la section 5.84) et à la Figure 2 de la présente CI.
9) Le réglage POA du décalage d’antenne GNSS indique que la position diffusée est référencée par rapport au point de référence de la position ADS-B de l’aéronef plutôt que par rapport à l’emplacement de l’antenne GNSS. Consultez également la section 5.84) et la Figure 2 de la présente CI. Pour plus de détails sur la POA, voir le document RTCA/DO-338, section 3.2.4.1
10) Vitesse au sol. Ce paramètre est également dérivé du capteur de position et fournit à l’ATC la vitesse de l’avion au sol. Ce paramètre est indiqué dans le message de position de gouverne.
11) Angle de route-sol. L’angle de route-sol est la direction du vecteur de vitesse horizontale au-dessus du sol. La route-sol ou le cap doit être transmis pendant que l’aéronef est au sol, pour que la transmission des informations complètes sur la vitesse soit possible.
12) Cap. Le cap indique la direction dans laquelle pointe le nez de l’avion. Il n’y a pas de mesure de précision du cap. Le cap ou la route-sol doit être transmis pendant que l’appareil est au sol, pour que la transmission des informations complètes sur la vitesse soit possible.
13) Vitesse horizontale. La vitesse horizontale indique la vitesse à laquelle un aéronef change de position horizontale dans une direction clairement définie. La vitesse horizontale est fournie, en vol, à l’aide des paramètres de vitesse nord/sud et est/ouest. La vitesse horizontale est fournie, au sol, par la combinaison de la vitesse-sol et du cap ou de la vitesse-sol et de la route-sol. La TSO-C166b exige que la vitesse nord/sud, la vitesse est/ouest, la vitesse au sol et la route-sol proviennent de la même source que la position. Les informations relatives au cap peuvent provenir d’une source distincte. La vitesse horizontale doit être transmise en vertu de la section 551.103 du chapitre 551 du MN.
14) Adresse 24 bits OACI. L’adresse 24 bits OACI est une adresse unique attribuée à un aéronef au cours de la procédure d’immatriculation. Les adresses 24 bits OACI sont des blocs d’adresses définis attribués aux pays ou États participants dans le monde entier. Au Canada, les aéronefs civils se voient attribuer une adresse à partir d’un système d’encodage basé sur les marques d’aéronefs. Des informations complémentaires concernant l’adresse 24 bits figurent dans les dispositions de l’OACI intitulées A World-Wide Scheme for the Allocation, Assignment and Application of Aircraft Addresses que l’on retrouve à l’annexe 10, partie I, volume III, appendice du chapitre 9. L’adresse 24 bits OACI doit être transmise en vertu de la section 551.103 du chapitre 551 du MN.
15) L’IDENT est un drapeau placé manuellement par le pilote à la demande de l’ATC dans les messages ATCRBS, de mode S et de l’ADS-B. Le pilote active manuellement l’état IDENT, qui met en évidence son aéronef sur l’écran du contrôleur. L’IDENT doit être transmise en vertu de la section 551.103 du chapitre 551 du MN.
16) Latitude et longitude. Ces paramètres sont dérivés de la source de position et ils fournissent une position géométrique. Référencez tous les éléments de position géométrique diffusés par l’unité ADS-B par rapport à l’ellipsoïde WGS-84. La transmission de la latitude et de la longitude est requise par la section 551.103 du chapitre 551 du MN.
17) Longueur et largeur de l’aéronef; Ce paramètre fournit à l’ATC et aux autres aéronefs une référence rapide aux dimensions de l’aéronef lorsqu’il est au sol. La transmission de la longueur et de la largeur de l’aéronef est requise en vertu de la section 551.103 du chapitre 551 du MN.
18) Code de mode 3/A. Actuellement, l’automatisation de l’ATC repose sur le code de mode 3/A pour identifier les aéronefs sous surveillance radar et corréler la cible à un plan de vol. Le code de mode 3/A est un nombre à quatre chiffres allant de 0000 à 7777. Les radars secondaires de surveillance (SSR) et l’ADS-B assureront simultanément la surveillance, de sorte que le code de mode 3/A est inclus dans le message ADS-B Émission et doit être transmis en vertu de la section 551.103 du chapitre 551 du Manuel de navigabilité. Note : Les systèmes ADS-B ne transmettront pas le code de mode 3/A si ce dernier est réglé sur 1000.
19) Catégorie de précision de navigation pour la position (NACp). La NACp spécifie la précision des informations relatives à la position horizontale de l’aéronef (latitude et longitude) transmises par l’avionique de l’aéronef. L’équipement ADS-B déduit une valeur NACp de la sortie de précision de la source de position, telle que le HFOM du GNSS. Le NACp spécifie avec une probabilité de 95 % que les informations rapportées sont correctes dans les limites d’une tolérance associée. Une valeur NACp minimale de « 8 » doit être transmise pour opérer dans l’espace aérien défini à la section 551.103 du chapitre 551 du MN. Le Tableau 14 présente les valeurs NACp applicables :
|
Valeur NACp |
Limite de précision horizontale |
|---|---|
|
0 |
EPU ≥ 18,52 km (10 nm) |
|
1 |
EPU < 18,52 km (10 nm) |
|
2 |
EPU < 7,408 km (4 nm) |
|
3 |
EPU < 3,704 km (2 nm) |
|
4 |
EPU < 1 852 m (1 nm) |
|
5 |
EPU < 926 m (0,5 nm) |
|
6 |
EPU < 555,6 m (0,3 nm) |
|
7 |
EPU < 185,2 m (0,1 nm) |
|
8 |
EPU < 92,6 m (0,05 nm) |
|
9 |
EPU < 30 m |
|
10 |
EPU < 10 m |
|
11 |
EPU < 3 m |
20) Catégorie de précision de navigation pour la vitesse (NACV) La NACV est une estimation de la précision de la vitesse géométrique horizontale. Le codage « 0 », qui indique que la précision est inconnue ou qu’elle est égale ou inférieure à 10 mètres par seconde (m/s), n’a que peu d’intérêt pour les applications ADS-B. Il n’existe pas de mesure de la précision du taux vertical. Une NACv de « 1 » ou plus est requise selon la section 551.103 du chapitre 551 du MN. Le Tableau 15 présente les valeurs NACv applicables.
|
Valeur NACV |
Limite de précision de la vitesse |
|---|---|
|
0 |
≥ 10 m/s |
|
1 |
< 10 m/s |
|
2 |
< 3 m/s |
|
3 |
< 1 m/s |
|
4 |
< 0,3 m/s |
21) Catégorie d’intégrité de navigation (NIC). Le paramètre NIC spécifie un rayon de confinement de l’intégrité de la position. La NIC est signalée pour que les applications de surveillance, telles que l’ATC ou d’autres aéronefs, puissent déterminer si la position géométrique signalée présente un niveau d’intégrité acceptable pour l’utilisation prévue. Le paramètre NIC est étroitement associé au SIL. Alors que la NIC spécifie le rayon de confinement de l’intégrité, le SIL spécifie la probabilité que la position réelle se trouve en dehors de ce rayon de confinement sans indication. Les systèmes ADS-B doivent dériver la NIC de la sortie d’intégrité d’une source de position approuvée, telle que le HPL du GNSS. Une valeur NIC minimale de « 7 » doit être transmise pour opérer dans l’espace aérien défini à la section 551.103 du chapitre 551 du MN. Le Tableau 16 fournit les valeurs NIC applicables.
|
NIC |
Rayon de confinement |
|---|---|
|
0 |
Inconnu |
|
1 |
RC < 37,04 km (20,0 nm) |
|
2 |
RC < 14,816 km (8,0 nm) |
|
3 |
RC < 7,408 km (4,0 nm) |
|
4 |
RC < 3,704 km (2,0 nm) |
|
5 |
RC < 1,852 km (1,0 nm) |
|
6 Sup A=1 Sup B=1 |
RC < 1,111 km (0,6 nm) |
|
6 Sup A=0 Sup B=0 |
RC < 926 m (0,5 nm) |
|
6 Sup A=0 Sup B=1 |
RC < 555,6 m (0,3 nm) |
|
7 |
RC < 370,4 m (0,2 nm) |
|
8 |
RC < 185,2 m (0,1 nm) |
|
9 |
RC < 75 m |
|
10 |
RC < 25 m |
|
11 |
RC < 7,5 m |
22) NICBARO. Indique si l’altitude-pression est fournie par un seul codeur Gillham ou par une autre source d’altitude plus robuste. En raison du risque d’erreur non détectée dans un encodage de Gillham, de nombreuses installations de Gillham font l’objet d’un contrôle croisé avec un second encodage annotant l’état de ce contrôle croisé.
23) Position. Ces paramètres sont dérivés de la source de position et ils fournissent une position géométrique. Référencez tous les éléments de position géométrique diffusés par l’unité ADS-B par rapport à l’ellipsoïde WGS-84. La transmission de la latitude et de la longitude est requise par la section 551.103 du chapitre 551 du MN.
24) Bit d’antenne unique. Ce paramètre indique si l’équipement ADS-B transmet par l’intermédiaire d’une seule antenne.
25) Niveau d’intégrité de source (SIL). Le champ SIL définit la probabilité que la position horizontale signalée dépasse le rayon de confinement défini par le NIC, sans alerte, en supposant qu’il n’y ait pas de défaillance du côté de l’avionique. Bien que le SIL suppose qu’il n’y a pas de défauts non annoncés dans le système avionique, il doit prendre en compte les effets de signaux dans l’espace (SIS) défectueux, si les SIS sont utilisés par la source de position. Une valeur SIL de « 3 » doit être transmise pour opérer dans l’espace aérien défini à la section 551.103 du chapitre 551 du MN. Le Tableau 17 présente les valeurs SIL.
Note 1 : La probabilité qu’une défaillance de l’avionique entraîne un dépassement du rayon de confinement défini par la NIC, sans alerte, est couverte par le paramètre SDA.
Note 2 : La probabilité SIL peut être définie soit par échantillon, soit par heure, comme indiqué dans le supplément SIL (SILSUPP).
|
Valeur SIL |
Probabilité de dépassement du rayon de confinement NIC |
|---|---|
|
0 |
> 1x10-3 par heure ou échantillon ou inconnu |
|
1 |
≤ 1x10-3 par heure ou échantillon |
|
2 |
≤ 1x10-5 par heure ou échantillon |
|
3 |
≤ 1x10-7 par heure ou échantillon |
26) Supplément au niveau d’intégrité de la source (SILSUPP). Le SILSUPP définit si la probabilité SIL signalée est basée sur une probabilité par heure ou une probabilité par échantillon telle que définie dans le Tableau 18.
|
Supplément SIL |
Base du rayon de confinement de la probabilité SIL |
|---|---|
|
0 |
La probabilité de dépassement du rayon de confinement NIC est basée sur le nombre d’heures. |
|
1 |
La probabilité de dépassement du rayon de confinement NIC est basée sur un échantillon. |
27) Assurance de la conception du système (SDA). Le paramètre SDA définit la condition de défaillance que le système ADS-B est conçu pour prendre en charge, telle que définie au Tableau 18. La condition de défaillance prise en charge indiquera la probabilité qu’un système ADS-B fasse défaut, entraînant la transmission de renseignements trompeurs ou erronés sur la position ou sur les mesures de qualité de la position. Cela devrait inclure la probabilité de dépasser le rayon de confinement sans que cela ne génère une annonce. Comme l’installateur de l’équipement ADS-B Émission ne sait pas comment les données diffusées seront utilisées, il ne peut pas effectuer une évaluation du risque fonctionnel (FHA) pour évaluer l’utilisation des données de diffusion. La SDA fournit un substitut à cette FHA en identifiant l’impact potentiel d’un rapport de position erroné causé par une défaillance de l’équipement. Les définitions et les probabilités associées à l’effet de la défaillance prise en charge sont définies dans la CI 25.1309-1, la CI 23.1309-1() et la CI 29-2 (modifications 1-3 incorporées). La SDA comprend la source de position, l’équipement ADS-B et tous les dispositifs intermédiaires qui traitent les données de position. La section 551.103 du chapitre 551 du MN exige une SDA de 2 ou 3, telle que définie dans le Tableau 19.
|
Valeur SDA |
Condition de défaillance prise en charge, note 2 |
Probabilité de défaillance entraînant la transmission d’informations fausses ou trompeuses, notes 3 et 4 |
Niveau d’assurance de la conception logicielle et matérielle, notes 1 et 3 |
|---|---|---|---|
|
0 |
Inconnu/Pas d’effet sur la sécurité |
> 1x10-3 par heure ou inconnu |
S.O. |
|
1 |
Mineure |
≤ 1x10-3 par heure |
D |
|
2 |
Majeure |
≤ 1x10-5 par heure |
C |
|
3 |
Dangereuse |
≤ 1x10-7 par heure |
B |
Note 1 : Assurance de la conception logicielle, conformément à la norme RTCA/DO-178C, Software Considerations in Airborne Systems and Equipment Certification, ou une norme équivalente. Assurance de la conception du matériel électronique aéroporté conformément à la norme RTCA/DO-254, Design Assurance Guidance for Airborne Electronic Hardware, ou une norme équivalente.
Note 2 : Classification des défaillances prises en charge définie dans la CI 25.1309-1(), la CI 23.1309-1() et la CI 29-2().
Note 3 : Comme la position de diffusion peut être utilisée par tout aéronef équipé de l’ADS-B Réception ou par l’ATC, les dispositions de la CI 23.1309-1() qui permettent de réduire les probabilités de défaillance et le niveau d’assurance de la conception pour les aéronefs de moins de 6 000 livres ne s’appliquent pas au système ADS-B Émission.
Note 4 : Comprend la probabilité de transmettre une latitude ou une longitude fausse ou trompeuse, ou des mesures de précision et d’intégrité de la position associées.
28) TCAS installé et opérationnel. Ce paramètre indique si l’aéronef est équipé d’un TCAS II et si ce dernier est activé et fonctionne dans un mode permettant de générer des alertes d’avis de résolution. Le paramètre TCAS installé et opérationnel doit être transmis en vertu de la section 551.103 du chapitre 551 du MN.
29) État du trafic TCAS. Ce paramètre indique si un aéronef équipé d’un TCAS II est en train de générer un avis de résolution TCAS. Le paramètre d’état du trafic TCAS doit être transmis en vertu de la section 551.103 du chapitre 551 du MN si l’aéronef est équipé d’un TCAS II.
30) Taux vertical. Le taux vertical est le taux barométrique ou géométrique auquel l’avion monte ou descend, mesuré en pieds par minute. Le taux vertical est généralement généré par un calculateur de données aérodynamiques ou une source de position GNSS, ou par un équipement qui combine le taux vertical barométrique avec le taux vertical inertiel et/ou le taux vertical GNSS.
31) Numéro de version. Le niveau de la norme minimale de performance opérationnelle (MOPS) de l’instruction technique normalisée applicable est communiqué par le numéro de version, qui est fixé au moment où l’équipement ADS-B est fabriqué. La version 2 s’applique à l’équipement ADS-B conforme aux documents MOPS RTCA/DO-260B avec rectificatif 1 ou RTCA/DO-282B avec rectificatif 1. L’équipement ADS-B produisant la version 2 ou une version plus récente est requis par la section 551.103 du chapitre 551 du MN.
Annexe B - Identification et qualification des sources de positions ADS-B
1.0 But
1) La présente annexe définit les exigences minimales pour les sources de position interfacées avec les systèmes ADS-B. Cette annexe définit également les méthodes appropriées de qualification des sources de position lorsque les instructions techniques normalisées relatives au GNSS existant ne contiennent pas d’exigences ou de procédures d’essai spécifiques. Le fabricant de la source de position doit fournir des données de conception, le cas échéant, de préférence dans le manuel d’installation de l’équipement GNSS, afin que l’installateur puisse interfacer correctement la source de position avec le système ADS-B. Les fournisseurs de sources de position doivent s’assurer que toutes les données fournies sont incorporées dans la conception de l’article et que les modifications apportées à toute caractéristique documentée entraînent un changement au numéro de pièce.
2.0 Organisation
1) Cette annexe comprend des conseils généraux qui s’appliquent à toutes les sources de position, ainsi que des conseils spécifiques au GNSS. L’annexe fournit également des exigences de haut niveau pour les sources de position GNSS/centrale inertielle de référence à configuration groupée et les sources de position autres que GNSS. Sauf indication contraire, toutes les références aux instructions techniques normalisées TSO-C129, TSO-C145, TSO-C146 et TSO-C196 contenues dans la présente CI se rapportent à toute révision de l’instruction technique normalisée.
3.0 Conseils généraux pour toutes les sources de position
1) Position. La source de la position doit fournir une latitude et une longitude. Les exigences et les procédures d’essai de la TSO-C129/145/146/196 sont suffisantes et les équipements GNSS disposant d’une autorisation d’instruction technique normalisée (TSOA) pour les TSO susmentionnées ne requièrent aucune qualification supplémentaire pour la sortie de position.
2) Vitesse horizontale. La source de position doit fournir des vitesses nord/sud et est/ouest. Nous recommandons que la source de position fournisse également la vitesse sous la forme d’un format de vitesse-sol et d’angle de route-sol.
3) Précision de la position (verticale). La source de position doit fournir une mesure de précision de la position verticale. La mesure de précision de la position verticale doit avoir été qualifiée lors de l’approbation de la conception du système ou de l’autorisation de l’instruction technique normalisée du système. Cette sortie doit décrire la précision de la position verticale avec une probabilité de 95 % dans des conditions sans défaut
4) Précision de la position (horizontale). La source de position doit avoir une sortie de précision de position horizontale, et la sortie doit avoir été qualifiée lors de l’approbation de la conception du système ou de l’approbation de l’instruction technique normalisée du système. Cette sortie doit décrire le rayon d’un cercle dans le plan horizontal, son centre se trouvant à la position vraie qui décrit la région assurée de contenir la position horizontale indiquée avec une probabilité d’au moins 95 % dans des conditions sans défaut.
5) Intégrité de la position (horizontale). La source de position doit avoir une sortie d’intégrité de position horizontale qualifiée lors de l’approbation de la conception du système ou de l’approbation de l’instruction technique normalisée du système. Cette sortie d’intégrité doit décrire le rayon d’un cercle dans le plan horizontal, son centre se trouvant à la position vraie qui décrit la région assurée de contenir la position horizontale indiquée avec une probabilité d’au moins 99,99999 % dans des conditions d’avionique sans défaut. Les sources de position qui passent d’une probabilité de 99,99999 à une probabilité de 99,999 % (comme un système inertiel/GNSS à configuration groupée après la perte du GNSS) peuvent toujours être installées; toutefois, elles ne seront pas conformes à la section 551.103 du chapitre 551 du MN à la suite de la dégradation. Dans ce cas, la source de position doit avoir un moyen d’indiquer le changement à l’équipement ADS-B. En outre, si le changement de probabilité est dû à un changement de source de position, la nouvelle source de position doit satisfaire à toutes les exigences de la présente annexe.
- a) Mode. Si l’interprétation de la sortie d’intégrité de la source de position peut changer en raison d’un changement de mode de la source de position, la source de position doit avoir un moyen de communiquer ce changement de mode à l’équipement ADS-B. En outre, le fabricant de la source de position doit fournir une description des modes et une description de la manière dont la source de position fournit l’indication de mode.
- b) Limite de validité. Si la valeur d’intégrité de la sortie ne peut être fiable au-delà d’une certaine limite, indiquez cette limitation dans la documentation de conception.
- c) Défaut d’intégrité. La source de position doit être en mesure d’identifier et d’émettre une indication de défaut d’intégrité. Cette indication doit se produire dans les 8 secondes qui suivent l’émission d’une position erronée. Le fabricant de la source de position doit fournir des informations sur la manière dont ce défaut d’intégrité est produit.
6) Intégrité de la position (probabilité). Le fabricant de la source de position doit fournir des informations décrivant la base de la probabilité de dépassement du rayon de confinement de l’intégrité horizontale. Cette base doit indiquer la probabilité de dépasser le rayon de confinement de l’intégrité, ainsi que la durée de l’échantillonnage (par heure ou par échantillon).
7) Détection des erreurs de SIS. La source de position doit permettre de détecter une erreur de SIS lorsque le système utilise un SIS. La probabilité d’une détection manquée pour un SIS défectueux doit être inférieure à 1x10-3. L’équipement GNSS fournit la détection d’erreur SIS appropriée.
8) Précision de la vitesse. La source de position doit avoir une sortie de précision de vitesse qui a été qualifiée en conjonction avec l’approbation de l’instruction technique normalisée du système ou l’approbation de la conception du système. Au lieu d’une sortie dynamique, le fabricant de la source de position peut démontrer une précision de vitesse dans le pire des cas, qui peut être présumée sur la base d’essais. Un essai des sources de position GNSS figure dans la dernière révision de l’AC 20-138, annexe 4 de la FAA. Le fabricant de la source de position peut proposer une méthode d’essai pour les sources autres que GNSS ou un autre essai pour les sources GNSS lors de l’approbation de la conception ou de l’approbation de l’instruction technique normalisée.
9) Assurance de conception. La source de la position doit prendre en charge un effet de défaillance majeure ou plus importante. Cela comprend les logiciels conformes à la norme RTCA/DO-178C, niveau C, et le matériel électronique aéroporté (AEH) conforme à la norme RTCA/DO-254, niveau C. Pour le matériel électronique aéroporté considéré comme simple, la section 1.6 de la norme RTCA/DO-254 s’applique. Comme la position de diffusion peut être utilisée par tout aéronef équipé de l’ADS-B Réception ou par l’ATC, les dispositions de la CI 23.1309-1() qui permettent de réduire les probabilités de défaillance et le niveau d’assurance de la conception pour les aéronefs de moins de 6 000 livres ne s’appliquent pas au système ADS-B Émission. La probabilité globale d’un dysfonctionnement de la source de position entraînant la sortie d’une position dépassant le rayon d’intégrité de sortie doit être inférieure à 1x10-5 par heure de vol.
10) Altitude géométrique. La source de position doit avoir une sortie d’altitude géométrique. L’altitude géométrique doit être référencée par rapport à l’ellipsoïde WGS-84.
11) Taux d’actualisation. La source de position doit émettre une nouvelle position au moins une fois par seconde. Des taux d’actualisation de la position plus rapides réduisent la latence de la position transmise et sont encouragés.
12) Latence de la source de position. Le fabricant de la source de position doit fournir des informations sur la latence de la source de position. Plus précisément, le fabricant doit fournir la quantité de latence totale de la source de position et de latence non compensée. Étant donné que les exigences en matière de latence sont basées sur l’ensemble du système ADS-B Émission, et pas seulement sur la source de position, les objectifs suivants en matière de latence de la source de position ne sont que des lignes directrices. La latence non compensée de la source de position doit être inférieure à 200 ms, la latence compensée doit être inférieure à 500 ms et la latence totale doit être inférieure à 700 ms.
Note 1 : La latence du système est décrite plus en détail à l’annexe C de la présente CI.
Note 2 : Cette section traite uniquement de la latence de position.
13) Heure d’applicabilité de position, de vitesse et de précision. Pour chaque position émise par la source, une vitesse, une mesure de précision de la position horizontale et une mesure de précision de la vitesse horizontale doivent également être émises. Toutes les mesures et tous les paramètres doivent avoir la même heure d’applicabilité. Une mesure d’intégrité de la position horizontale doit également être produite, mais son heure d’applicabilité peut créer un décalage de position. Consultez l’instruction technique normalisée TSO-C145, TSO-C146 ou TSO-C196 pour plus d’informations sur le délai d’alerte de l’intégrité.
14) Marque de temps. Les sources de position doivent produire une marque de temps identifiant l’heure d’applicabilité de la position en temps universel coordonné (UTC). La marque de temps peut être utilisée par l’équipement ADS-B pour réduire la latence non compensée.
15) Disponibilité. La section 551.103 du chapitre 551 du MN ne définit pas d’exigence de disponibilité; il s’agit toutefois d’un facteur opérationnel important lors de la sélection de la source de position (voir le Tableau 21).
4.0 Sources de position GNSS
1) Position - Les sources de position GNSS doivent fournir une latitude et une longitude. Les exigences et les procédures d’essai des instructions techniques normalisées TSO-C129/145/146/196 sont suffisantes et les équipements GNSS disposant d’une approbation d’instruction technique normalisée (TSOA) pour les TSO susmentionnées ne requièrent aucune qualification supplémentaire pour la sortie de position. Certaines sorties de position GNSS sont référencées par rapport au centre de navigation de l’aéronef. Les fabricants doivent documenter les conditions dans lesquelles la position est émise de cette manière. Les installateurs doivent configurer l’installation ADS-B pour tenir compte de tout décalage de position par rapport au point de référence de surveillance ou à la position de l’antenne GNSS, selon le cas.
Note : L’objectif est de fournir la position, la vitesse et le HFOM de manière cohérente pour l’heure d’applicabilité (voir RTCA/DO-229D, Minimum Operational Performance Standards for Global Positioning System/Wide Area Augmentation System Airborne Equipment, sections 2.1.2.6 et 2.1.2.6.2).
- a) TSO-C129. Les exigences relatives à la précision 2D énoncées à la section (a)(3)(xvi) de la TSO-C129 ne garantissent pas la conformité totale de l’unité GNSS. D’autres moyens de conformité à cette TSO exigent que les fabricants de GNSS prouvent que la latitude/longitude est émise et référencée dans le système de coordonnées géographiques WGS-84.
- b) TSO-C129a. Les exigences relatives à la précision 2D énoncées à la section (a)(3)(xvi) de la TSO-C129 ne garantissent pas la conformité totale de l’unité GNSS. D’autres moyens de conformité à cette TSO exigent que les fabricants de GNSS prouvent que la latitude/longitude est émise et référencée dans le système de coordonnées géographiques WGS-84.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, section 2.1.2.6.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.4.8 et 2.1.5.8.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, section 2.1.2.6.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.4.8 et 2.1.5.8.
- g) TSO-C196/196a. Les moyens de conformité pour ce TSO sont définis dans le document RTCA/DO-316, Minimum Operational Performance Standards for Global Positioning System/Aircraft Based Augmentation System, section 2.1.2.6.
2) Latence de la source de position. Le fabricant de source de position GNSS doivent fournir des informations sur la latence de la source de position.
- a) TSO-C129. Les moyens de conformité pour cette TSO exigent des fabricants de GNSS qu’ils documentent la latence de la source de position entre le moment de la mesure (TOM) et le moment de la sortie de la position. Si cette latence dépasse 0,9 seconde, il se peut qu’il ne prenne pas en charge la latence de transmission ADS-B de 2 secondes au niveau de l’aéronef.
- b) TSO-C129a. Les moyens de conformité pour cette TSO exigent des fabricants de GNSS qu’ils documentent la latence de la source de position entre le TOM et le moment de la sortie de la position. Si cette latence dépasse 0,9 seconde, il se peut qu’il ne prenne pas en charge la latence de transmission ADS-B de 2 secondes au niveau de l’aéronef.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, section 2.1.2.6.2.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.2.6.2 et 2.1.5.8.2.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, section 2.1.2.6.2.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.2.6.2 et 2.1.5.8.2.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-316, section 2.1.2.6.2.
3) Disponibilité
- a) L’analyse a montré la disponibilité estimée suivante pour les récepteurs GPS de cette TSO utilisant un angle de masque d’antenne de 2 degrés (voir le Tableau 21), en supposant que la constellation de satellites GPS ait un seuil minimal. Le seuil minimal de la constellation est la probabilité que les emplacements soient remplis par des satellites sains. Dans le Tableau 20, la FAA et TCCA utilisent les probabilités de constellation modifiées de l’Interagency Forum for Operational Requirements (IFOR) qui proposent une estimation prudente de la disponibilité prévue du GNSS. Les probabilités IFOR modifiées ne sont pas garanties par la U.S. Air Force (exploitant de la constellation GPS), mais sont censées être conformes à la norme de performance du service de positionnement standard du système de positionnement mondial (GPS), révision 4, datée de septembre 2008. Les probabilités d’état de constellation au seuil IFOR modifié basées sur cette norme de performance (une probabilité 0,99999 % de 20 satellites ou paires de satellites sains dans une configuration d’emplacement élargi) sont indiquées dans le Tableau 20.
|
Nombre de satellites sains |
Probabilité qu’un nombre donné de satellites soient sains |
Probabilité qu’au moins un nombre donné de satellites soient sains |
|---|---|---|
|
24 |
0,72 % |
0,72 % |
|
23 |
0,17 % |
0,89 % |
|
22 |
0,06 % |
0,95 % |
|
21 |
0,03 % |
0,98 % |
|
20 |
0,02 % |
1,00 % |
|
19 |
0 % |
1,00 % |
|
18 |
0 % |
1,00 % |
|
Service de positionnement (norme du récepteur) |
Disponibilité prévue (conformité ADS-B) |
|---|---|
|
GPS (TSO-C129) (SA activé) |
≥ 89,0 % |
|
GPS (TSO-C196) (SA désactivé) |
≥ 99,0 % |
|
GPS/SBAS (TSO-C145/TSO-C146) |
≥ 99,9 % |
4) Intégrité de la position horizontale. Les sources de position GNSS doivent avoir une sortie d’intégrité de la position horizontale (telle que HIL ou HPL) qualifiée lors de l’approbation de la conception ou de l’approbation de la TSO du système pour déterminer la NIC.
- a) TSO-C129. Les exigences définies pour les équipements de classe A, B et C assurent l’intégrité horizontale par le biais d’algorithmes de surveillance autonome de l’intégrité du récepteur (RAIM) conformément à la norme RTCA/DO-208 modification 1, Minimum Operational Performance Standards for Airborne Supplemental Navigation Equipment Using Global Positioning System (GPS), section 2.2.1.13. Toutefois, il n’est pas nécessaire de calculer ou d’éditer le HPL. Pour se conformer correctement aux exigences de l’ADS-B, des moyens de conformité supplémentaires pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification montrant que l’équipement émet un HPL de 1x10-7/h basé sur l’algorithme RAIM au moins une fois par seconde qui respecte un délai d’alerte de 10 secondes. Bien que la section 551.103 du chapitre 551 du MN définisse un délai maximal de 12 secondes, le présent avis consultatif recommande un délai d’alerte de 8 secondes. La valeur du niveau de protection est acceptable en tant que HPL si l’équipement effectue l’essai prévu dans la norme RTCA/DO-208 modification 1, section 2.5.2.5, en utilisant cette valeur de niveau de protection pour la comparer à la limite d’alarme. L’équipement utilisant la méthode RAIM résiduelle par moindres carrés recommandée dans le document RTCA/DO-208 modification 1, annexe F, fournissent un HPL acceptable.
- b) TSO-C129a. Les exigences définies pour les équipements de classe A, B et C assurent l’intégrité horizontale par le biais d’algorithmes RAIM conformément à la norme RTCA/DO-208 modification 1, section 2.2.1.13. Toutefois, il n’est pas nécessaire de calculer ou d’éditer le HPL. Pour se conformer correctement aux exigences de l’ADS-B, des moyens de conformité supplémentaires pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification montrant que l’équipement émet un HPL basé sur l’algorithme RAIM au moins une fois par seconde qui respecte un délai d’alerte de 10 secondes. Bien que la section 551.103 du chapitre 551 du MN définisse un délai maximal de 12 secondes, le présent avis consultatif recommande un délai d’alerte de 8 secondes. La valeur du niveau de protection est acceptable en tant que HPL si l’équipement effectue l’essai prévu dans la norme RTCA/DO-208 modification 1, section 2.5.2.5, en utilisant cette valeur de niveau de protection pour la comparer à la limite d’alarme. L’équipement utilisant la méthode RAIM résiduelle par moindres carrés recommandée dans le document RTCA/DO-208 modification 1, annexe F, fournissent un HPL acceptable.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.2.6.2, 2.1.2.2.2 et 2.1.3.2.2. Un résumé de ces dernières exigences figure dans le document RTCA/DO-229C, section 2.1.1.13.1.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.2.6, 2.1.2.2.2, 2.1.3.2.2, 2.1.4.2.2 et 2.1.5.2.2. Un résumé de ces dernières exigences figure dans le document RTCA/DO-229C, section 2.1.1.13.1.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.2.6.2, 2.1.2.2.2 et 2.1.3.2.2. Les exigences correspondantes figurent dans le document RTCA/DO-229D, sections 2.1.1.4 et 2.1.4.9.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.2.6, 2.1.2.2.2, 2.1.3.2.2, 2.1.4.2.2 et 2.1.5.2.2. Les exigences correspondantes figurent dans le document RTCA/DO-229D, sections 2.1.1.4 et 2.1.4.9.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-316, sections 2.1.2.6, 2.1.2.2.2 et 2.1.3.2.
5) Intégrité de la position (probabilité). Les fabricants de la source de position GNSS doivent fournir des informations décrivant la base de la probabilité de dépassement du rayon de confinement de l’intégrité horizontale.
- a) TSO-C129. Les moyens de conformité pour TSO-C129 sont définis dans le document RTCA/DO-208 modification 1, section 2.2.1.13.1, en référence au tableau 2-1.
- b) TSO-C129a. Les moyens de conformité pour TSO-C129a sont définis dans le document RTCA/DO-208 modification 1, section 2.2.1.13.1, en référence au tableau 2-1.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, section 2.1.2.2.2.1 pour l’intégrité basée sur le système de renforcement satellitaire (SBAS). (Cette exigence fait référence à l’annexe J, section J.2.1, uniquement.) Pour des conseils supplémentaires sur une méthode de mise à l’échelle acceptable, les fabricants de GNSS peuvent se référer au document RTCA/DO-229C, annexe U, section 4. Les exigences relatives à la FDE (détection et exclusion des défaillances) se trouvent à la section 2.1.2.2.2.2.2.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, section 2.1.2.2.2.1 pour l’intégrité basée sur le SBAS. Cette exigence fait référence à l’annexe J, section J.2.1, qui définit l’intégrité de la position. (Probabilité d’intégrité uniquement.) Pour des conseils supplémentaires sur une méthode de mise à l’échelle acceptable, les fabricants de GNSS peuvent se référer au document RTCA/DO-229C, annexe U, section 4. Les exigences relatives à la FDE (détection et exclusion des défaillances) se trouvent à la section 2.1.2.2.2.2.2.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, section 2.1.2.2.2.1 pour l’intégrité basée sur le SBAS. Cette exigence fait référence à l’annexe J, section J.3.1, qui définit l’intégrité de la position. (Intégrité uniquement.) Pour des conseils supplémentaires sur une méthode de mise à l’échelle acceptable, les fabricants de GNSS peuvent se référer au document RTCA/DO-229D, annexe U, section 4. Les exigences relatives à la FDE (détection et exclusion des défaillances) se trouvent à la section 2.1.2.2.2.2.2.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, section 2.1.2.2.2.1 pour l’intégrité basée sur le SBAS. L’annexe J, section J.3.1, présente une définition générale de l’intégrité de la position. (Intégrité uniquement.) Pour des conseils supplémentaires sur une méthode de mise à l’échelle acceptable, les fabricants de GNSS peuvent se référer au document RTCA/DO-229D, annexe U, section 4. Les exigences relatives à la FDE (détection et exclusion des défaillances) se trouvent à la section 2.1.2.2.2.2.2.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-316, section 2.1.2.2.2.2. Pour des conseils supplémentaires sur une méthode de mise à l’échelle acceptable, les fabricants de GNSS peuvent se référer au document RTCA/DO-316, annexe U, section 4.
6) Alertes des défauts d’intégrité. Les fabricants de sources de position GNSS doivent fournir des données de conception sur le temps maximum que la source de position peut prendre pour indiquer un défaut d’intégrité. Si l’indication de défaut est spécifique à un mode, les données relatives à tous les modes doivent être incluses. Il est recommandé que l’indication d’un défaut d’intégrité soit fournie dans les 8 secondes dans tous les modes. Toutes les révisions des équipements GNSS TSO-C145, TSO-C146 et TSO-C196 répondent à cette exigence. Aucune révision de l’équipement GNSS TSO-C129 ne répond à cette exigence sans satisfaire à d’autres qualifications décrites ci-dessous. Les récepteurs conformes à la caractéristique ARINC 743A-5, GNSS Sensor, datée de mai 2009, représentent la condition dans laquelle une panne de satellite a été détectée mais le récepteur n’a pas été en mesure d’exclure le satellite en panne en réglant le bit 11 de l’étiquette 130. Ce bit doit être interprété de manière à rendre la position invalide, quel que soit le HIL ou le HPL indiqué.
- a) TSO-C129. Les exigences du document RTCA/DO-208 modification 1, section 2.2.1.13.1, couvrent le délai d’alarme pour les différentes phases de vol. Pour se conformer correctement à la sortie globale de défaut d’intégrité de 12 secondes pour l’ADS-B, des moyens supplémentaires de conformité pour la TSO-C129 exigent que les fabricants de GNSS fournissent des informations dans les instructions d’installation décrivant la sortie de latence de défaut d’intégrité de l’équipement avec des instructions d’interface et/ou des limitations pour respecter l’allocation de 12 secondes fixée par la section 551.103 du chapitre 551 du MN.
- b) TSO-C129a. Les exigences du document RTCA/DO-208 modification 1, section 2.2.1.13.1, couvrent le délai d’alarme pour les différentes phases de vol. Pour se conformer correctement à la sortie globale de défaut d’intégrité de 12 secondes pour l’ADS-B, des moyens supplémentaires de conformité pour la TSO-C129a exigent que les fabricants de GNSS fournissent des informations dans les instructions d’installation décrivant la sortie de latence de défaut d’intégrité de l’équipement avec des instructions d’interface et/ou des limitations pour respecter l’allocation de 12 secondes fixée par la présente CI.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.1.13 et 2.1.2.2.2.2.1 jusqu’à 2.1.2.2.2.2.4.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.1.13, 2.1.2.2.2.2.1 à 2.1.2.2.2.2.4, et 2.1.4.2.2.2.1 à 2.1.4.2.2.2.3.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.1.13 et 2.1.2.2.2.2.1 jusqu’à 2.1.2.2.2.2.4.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.1.13, 2.1.2.2.2.2.1 à 2.1.2.2.2.2.4, et 2.1.4.2.2.2.1 à 2.1.4.2.2.2.3.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-316, sections 2.1.1.11 et 2.1.2.2.2.1 jusqu’à 2.1.2.2.2.4
7) Limites d’intégrité de la position. Cette exigence était auparavant appelée limite de validité de l’intégrité. Les calculs de HPL basés sur le RAIM à fréquence unique ont été conçus pour soutenir les applications de navigation et fournir une limite d’erreur appropriée jusqu’à environ 0,1 nm. Bien que des valeurs HPL nettement inférieures à 0,1 nm puissent être obtenues à partir de sources GNSS à fréquence unique, si la valeur HPL a été calculée à l’aide du RAIM, il se peut qu’elle n’atteigne pas le niveau de protection indiqué, car certaines contributions d’erreur ne sont plus négligeables et doivent être prises en considération. Ces sources d’erreur comprennent notamment la corrélation des erreurs ionosphériques entre les satellites, les erreurs de compensation du retard troposphérique, les trajets multiples et les erreurs de bruit au niveau du récepteur. Ce problème n’est pas propre aux sources de position GPS non augmentées, car toutes les révisions des instructions techniques normalisées TSO-C145 et TSO-C146 relatives aux sources de position GNSS calculent également l’intégrité sur la base du RAIM lorsque l’intégrité du système de renforcement satellitaire (SBAS) n’est pas utilisée. Même en cas d’utilisation de l’augmentation SBAS, le calcul d’intégrité n’est pas nécessaire pour tenir compte de ces sources d’erreur, sauf en modes d’approche LNAV/VNAV ou LPV/LP. Les sources de position compatibles ADS-B doivent fournir à l’installateur des informations sur la conception qui précisent les éléments suivants :
- a) Si une source de position TSO-C129 ou TSO-C196 limite la sortie HPL à plus de 75 mètres. Si la source de position ne limite pas sa sortie HPL, le fabricant de la source de position doit fournir des conseils à l’installateur du système ADS-B pour s’assurer que l’équipement ADS-B limite la NIC à ≤ 8. Bien que les valeurs HPL basées sur le RAIM à fréquence unique ne soient précises qu’à environ 0,1 nm, pour les besoins de l’ADS-B, la source de position ne doit limiter le HPL qu’à plus de 75 mètres, car un HPL supérieur à 75 mètres garantit que l’équipement ADS-B n’établira qu’une NIC de ≤ 8.
- (i) TSO-C129. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS présentent des données de justification, que le HPL soit limité ou non, et fournissent des instructions d’installation appropriées pour l’intégration de l’ADS-B.
- (ii) TSO-C129a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS présentent des données de justification, que le HPL soit limité ou non, et fournissent des instructions d’installation appropriées pour l’intégration de l’ADS-B.
- (iii) TSO-C196/196a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS présentent des données de justification, que le HPL soit limité ou non, et fournissent des instructions d’installation appropriées pour l’intégration de l’ADS-B.
- b) Qu’une source de position TSO-C145 ou TSO-C146 limite le HPL dans les modes augmentés autres que SBAS à plus de 75 mètres. Si la source de position ne limite pas la sortie HPL dans les modes non augmentés, le fabricant de la source de position doit fournir des conseils à l’installateur du système ADS-B pour s’assurer que l’équipement ADS-B limite le NIC à ≤ 8 dans les modes non augmentés. Le fabricant de la source de position doit également fournir des instructions sur la manière de déterminer le mode de la source de position, le cas échéant.
- (i) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS présentent des données de justification, que le HPL soit limité ou non, et fournissent des instructions d’installation appropriées pour l’intégration de l’ADS-B.
- (ii) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS présentent des données de justification, que le HPL soit limité ou non, et fournissent des instructions d’installation appropriées pour l’intégration de l’ADS-B. Les installations qui ont l’intention de prendre en charge des NIC ≥ 9 doivent utiliser les exigences d’approche LNAV/VNAV ou LPV/LP (RTCA/DO-229C, section 2.1) au moment de la sortie HPL, conformément à la TSO-C145/C146 rév. a, mais le facteur K en route à travers la LNAV (6,18 contre 6) doit être appliqué (voir RTCA/DO-229C, annexe J, section 2.1 et annexe U, section 4). Soit l’équipement source GNSS définit le facteur K pour le HPL, soit l’équipement ADS-B applique la mise à l’échelle appropriée. Le fabricant du GNSS doit présenter des données justifiant l’utilisation du facteur K et fournir des instructions d’installation appropriées pour l’intégration de l’ADS-B.
- (iii) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS présentent des données de justification, que le HPL soit limité ou non, et fournissent des instructions d’installation appropriées pour l’intégration de l’ADS-B.
- (iv) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification, que le HPL soit limité ou non, et fournissent des instructions d’installation appropriées pour l’intégration de l’ADS-B. Les installations qui ont l’intention de prendre en charge des NIC ≥ 9 doivent utiliser les exigences d’approche LNAV/VNAV ou LPV/LP (RTCA/DO-229D, section 2.1) au moment de la sortie HPL, conformément à la TSO-C145/C146 rév. b/c, mais le facteur K en route à travers la LNAV (6,18 contre 6) doit être appliqué (voir RTCA/DO-229D, annexe J, section 3.1 et annexe U, section 4). Soit l’équipement source GNSS définit le facteur K pour le HPL, soit l’équipement ADS-B applique la mise à l’échelle appropriée. Le fabricant du GNSS doit présenter des données justifiant l’utilisation du facteur K et fournir des instructions d’installation appropriées pour l’intégration de l’ADS-B.
8) Précision de la position horizontale. Les sources de position GNSS doivent fournir une sortie HFOM qui a été démontrée lors de l’approbation de la conception de la source de position ou lors de l’approbation de l’installation. Les GNSS certifiés selon les instructions techniques normalisées TSO-C145b/c, TSO-C146b/c/d ou toutes les révisions de la TSO-C196 doivent fournir la sortie HFOM. Les normes TSO-C129, TSO-C145a et TSO-C146a ne contiennent pas d’exigence en matière de précision de la position horizontale; cependant, tous les équipements doivent fournir une sortie HFOM pour être considérés comme une source de position conforme à l’ADS-B.
Note : L’objectif est d’émettre la position, la vitesse et le HFOM d’une manière cohérente pour l’heure d’applicabilité (voir RTCA/DO-229D, sections 2.1.2.6 et 2.1.2.6.2).
- a) TSO-C129. Les moyens de conformité pour cette TSO exigent des fabricants de GNSS qu’ils fournissent des données de justification montrant que l’équipement calcule et émet la HFOM. Consultez l’essai décrit dans l’AC 20-138(), annexe 4, section A4-11 de la FAA pour un essai HFOM acceptable.
- b) TSO-C129a. Les moyens de conformité pour cette TSO exigent des fabricants de GNSS qu’ils fournissent des données de justification montrant que l’équipement calcule et émet la HFOM. Consultez l’essai décrit dans l’AC 20-138(), annexe 4, section A4-11 de la FAA pour un essai HFOM acceptable.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification basées sur l’essai décrit dans l’AC 20-138(), annexe 4, section A4-11 de la FAA pour un essai HFOM acceptable.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification basées sur l’essai décrit dans l’AC 20-138(), annexe 4, section A4-11 de la FAA pour un essai HFOM acceptable.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, section 2.1.2.6 (voir également la section 1.7.1 et l’annexe H de la RTCA/DO-229D).
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, section 2.1.2.6 (voir également la section 1.7.1 et l’annexe H de la RTCA/DO-229D).
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-316, section 2.1.2.6 (voir également la section 1.7.1 et l’annexe H de la RTCA/DO-316).
9) Altitude géométrique. Toutes les sources de position GNSS doivent fournir une altitude géométrique. L’altitude géométrique, pour les besoins de l’ADS-B, est la hauteur au-dessus de l’ellipsoïde WGS-84 (ce n’est pas le MSL). Nous recommandons que la source de position GNSS fournisse l’altitude géométrique en tant que hauteur au-dessus de l’ellipsoïde (HAE). Certaines sources de position GNSS fournissent la hauteur au-dessus du géoïde (HAG) au lieu de la HAE. Le fabricant de la source de position doit fournir des données indiquant si la source de position fournit la HAE ou la HAG.
- a) TSO-C129. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données pour justifier l’émission de la HAE. Les données produites pour justifier la précision de la position verticale conformément à l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10, de la FAA sont suffisantes. Pour les équipements GPS qui produisent d’autres mesures d’altitude, les instructions d’installation doivent spécifier une méthode déterministe pour effectuer la conversion en HAE.
- b) TSO-C129a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données pour justifier l’émission de la HAE. Les données produites pour justifier la précision de la position verticale conformément à l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10, de la FAA sont suffisantes. Pour les équipements GPS qui produisent d’autres mesures d’altitude, les instructions d’installation doivent spécifier une méthode déterministe pour effectuer la conversion en HAE.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO exigent des fabricants de GNSS qu’ils fournissent des données de justification montrant que l’équipement fournit la HAE. Les données produites pour justifier la précision de la position verticale conformément à l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10, de la FAA sont suffisantes.
- d) TSO-C145/146 rév. a, classe 2/3. Pour les équipements de classe 2, les moyens de conformité pour cette TSO exigent des fabricants de GNSS qu’ils fournissent des données de justification montrant que l’équipement émet la HAE. Les données produites pour justifier la précision de la position verticale conformément à l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10, de la FAA sont suffisantes. L’équipement de classe 3 est conforme à l’exigence d’altitude géométrique de l’ADS-B, conformément à la norme RTCA/DO-229C, section 2.1.5.8.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO exigent des fabricants de GNSS qu’ils fournissent des données de justification montrant que l’équipement fournit la HAE. Les données produites pour justifier la précision de la position verticale conformément à l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10, de la FAA sont suffisantes.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO exigent des fabricants de GNSS qu’ils fournissent des données de justification montrant que l’équipement fournit la HAE. Les données produites pour justifier la précision de la position verticale conformément à l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10, de la FAA sont suffisantes.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO exigent des fabricants de GNSS qu’ils fournissent des données de justification montrant que l’équipement fournit la HAE. Les données produites pour justifier la précision de la position verticale conformément à l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10, de la FAA sont suffisantes.
10) Taux d’actualisation. La source de position doit émettre une nouvelle position au moins une fois par seconde. Des taux d’actualisation de la position plus rapides réduisent la latence de la position transmise et sont encouragés.
- a) TSO-C129. Les moyens de conformité pour la TSO-C129 sont décrits dans le document RTCA/DO-208 modification 1, section 2.1.11 pour les écrans. Cette exigence est modifiée par la TSO-C129, section (a)(3)(vi) pour les données de navigation utilisées pour l’affichage dans l’équipement de classe A. Les équipements de classe B et de classe C sont modifiés respectivement par les sections (a)(4)(v) et (a)(5)(v).
- b) TSO-C129a. Les moyens de conformité pour la TSO-C129a sont décrits dans le document RTCA/DO-208 modification 1, section 2.1.11 pour les écrans. Cette exigence est modifiée par la TSO-C129a, section (a)(3)(vi) pour les données de navigation utilisées pour l’affichage dans l’équipement de classe A. Les équipements de classe B et de classe C sont modifiés respectivement par les sections (a)(4)(v) et (a)(5)(v).
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, section 2.1.2.6.1.
- d) TSO-C145/146 rév. a, classe 2. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.2.6.1 et 2.1.5.8.1.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, section 2.1.2.6.1.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.2.6.1 et 2.1.5.8.1.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-316, section 2.1.2.6.1.
11) Vitesse horizontale. La source de position doit fournir des vitesses nord/sud et est/ouest. Il est recommandé que la source de position fournisse également la vitesse dans un format de vitesse-sol et d’angle de route-sol. Note : L’objectif est d’émettre la position, la vitesse et les mesures de qualité d’une manière cohérente pour l’heure d’applicabilité (voir RTCA/DO-229D, sections 2.1.2.6 et 2.1.2.6.2).
- a) TSO-C129. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS effectuent l’essai de vitesse prévu dans l’AC 20-138(), annexe 4 de la FAA et fournissent des informations justifiant la sortie des données.
- b) TSO-C129a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS effectuent l’essai de vitesse prévu dans l’AC 20-138(), annexe 4 de la FAA et fournissent des informations justifiant la sortie des données.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, section 2.1.2.6, ainsi que l’essai défini dans l’AC 20-138(), annexe 4 de la FAA.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, section 2.1.2.6, ainsi que l’essai défini dans l’AC 20-138(), annexe 4 de la FAA.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, section 2.1.2.6. L’exigence pour cette TSO porte uniquement sur la vitesse de sortie, mais il n’y a pas d’exigence en matière de précision. Pour satisfaire à cette exigence de l’ADS-B, le fabricant du GNSS doit également se conformer aux exigences de précision de la vitesse horizontale et aux essais décrits dans l’AC 20-138(), annexe 4 de la FAA.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, section 2.1.2.6. L’exigence pour cette TSO porte uniquement sur la vitesse de sortie, mais il n’y a pas d’exigence en matière de précision. Pour satisfaire à cette exigence de l’ADS-B, le fabricant du GNSS doit également se conformer aux exigences de précision de la vitesse horizontale et aux essais décrits dans l’AC 20-138(), annexe 4 de la FAA.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-316, section 2.1.2.6. L’exigence pour cette TSO porte uniquement sur la vitesse de sortie, mais il n’y a pas d’exigence en matière de précision. Pour satisfaire à cette exigence de l’ADS-B, le fabricant du GNSS doit également se conformer aux exigences de précision de la vitesse horizontale et aux essais décrits dans l’AC 20-138(), annexe 4 de la FAA.
- Note : L’essai de vitesse figurant dans l’AC 20-138() de la FAA est également défini dans la section 2.3.6.4 du document RTCA/DO-316.
12) Vitesse au sol. Il est recommandé que la source de position émette la vitesse-sol. Les fabricants de GNSS qui choisissent d’indiquer la vitesse-sol peuvent démontrer la conformité comme décrit ci-dessous pour la TSO appropriée.
- a) TSO-C129. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des informations dans les instructions d’installation décrivant la manière dont la vitesse est émise (c’est-à-dire dans un format de vitesse-sol ou dans un format de vitesse nord/est), ainsi que les protocoles utilisés.
- b) TSO-C129a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des informations dans les instructions d’installation décrivant la manière dont la vitesse est émise (c’est-à-dire dans un format de vitesse-sol ou dans un format de vitesse nord/est), ainsi que les protocoles utilisés.
- c) TSO-C145/146 rév. a, classe 1. Les exigences relatives à l’équipement Gamma décrites dans le document RTCA/DO-229C, section 2.2.1.4.10 pour la résolution d’affichage de la vitesse-sol sont insuffisantes pour démontrer la conformité de l’ADS-B. Une recommandation pour les fabricants de GNSS sur l’étiquette 103 et l’étiquette 112 se trouve dans le document RTCA/DO-229D, annexe H. Des moyens supplémentaires de conformité pour la TSO-C145/146 rév. a, classe 1, exigent que les fabricants de GNSS fournissent des informations dans les instructions d’installation décrivant la manière dont la vitesse est émise (c’est-à-dire dans un format de vitesse-sol ou dans un format de vitesse nord/est), ainsi que les protocoles utilisés.
- d) TSO-C145/146 rév. a, classe 2/3. Les exigences relatives à l’équipement Gamma décrites dans le document RTCA/DO-229C, section 2.2.1.4.10 pour la résolution d’affichage de la vitesse-sol sont insuffisantes pour démontrer la conformité de l’ADS-B. Une recommandation pour les fabricants de GNSS sur l’étiquette 103 et l’étiquette 112 se trouve dans le document RTCA/DO-229D, annexe H. Des moyens supplémentaires de conformité pour la TSO-C145/146 rév. a, classe 2/3, exigent que les fabricants de GNSS fournissent des informations dans les instructions d’installation décrivant la manière dont la vitesse est émise (c’est-à-dire dans un format de vitesse-sol ou dans un format de vitesse nord/est), ainsi que les protocoles utilisés.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les exigences relatives à l’équipement Gamma-1 décrites dans le document RTCA/DO-229D, section 2.2.1.4.10 pour la résolution d’affichage de la vitesse-sol sont insuffisantes pour démontrer la conformité de l’ADS-B. Une recommandation pour les fabricants de GNSS sur l’étiquette 103 et l’étiquette 112 se trouve dans le document RTCA/DO-229D, annexe H. Des moyens supplémentaires de conformité pour la TSO-C145/146 rév. b/c/d, classe 1, exigent que les fabricants de GNSS fournissent des informations dans les instructions d’installation décrivant la manière dont la vitesse est émise (c’est-à-dire dans un format de vitesse-sol ou dans un format de vitesse nord/est), ainsi que les protocoles utilisés.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les exigences relatives à l’équipement Gamma-2 et Gamma-3 décrites dans le document RTCA/DO-229D, section 2.2.1.4.10 pour la résolution d’affichage de la vitesse-sol sont insuffisantes pour démontrer la conformité de l’ADS-B. Une recommandation pour les fabricants de GNSS sur l’étiquette 103 et l’étiquette 112 se trouve dans le document RTCA/DO-229D, annexe H. Des moyens supplémentaires de conformité pour la TSO-C145/146 rév. b/c/d, classe 2/3, exigent que les fabricants de GNSS fournissent des informations dans les instructions d’installation décrivant la manière dont la vitesse est émise (c’est-à-dire dans un format de vitesse-sol ou dans un format de vitesse nord/est), ainsi que les protocoles utilisés.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des informations dans les instructions d’installation décrivant la manière dont la vitesse est émise (c’est-à-dire dans un format de vitesse-sol ou dans un format de vitesse nord/est), ainsi que les protocoles utilisés. Une recommandation pour les fabricants de GNSS concernant les étiquettes 103 et 112 figure dans le document RTCA/DO-316, annexe H.
13) Heure d’applicabilité. L’équipement GNSS doit fournir une heure d’applicabilité.
Note : L’objectif est d’émettre la position, la vitesse et le HFOM avec une heure d’applicabilité cohérente (voir RTCA/DO-229D, sections 2.1.2.6 et 2.1.2.6.2).
- a) TSO-C129. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS utilisent un essai et/ou une analyse définis par le fabricant pour déterminer le temps de latence entre le moment où les mesures satellitaires sont rassemblées pour le traitement et le moment où l’équipement calcule une solution de position filtrée (réponse impulsionnelle). Par exemple, le récepteur n’effectue pas les observations à un moment donné, mais les échelonne, peut-être pour réduire le débit. Dans ce cas, il faudrait extrapoler les observations à un moment commun. Il existe de nombreuses méthodes d’extrapolation, mais certaines utilisent un filtrage qui peut induire une latence. Cet aspect devrait être pris en compte dans l’analyse de latence. Étant donné qu’il y a des filtres, la mesure de la réponse impulsionnelle peut être un moyen d’observer ce délai. Autre exemple : un récepteur utilise un filtre de Costas d’une largeur de bande spécifique dans le cadre de la boucle de poursuite. Cette largeur de bande limite la vitesse à laquelle une manœuvre dynamique se propage dans la boucle de poursuite et, donc, dans la position résultante. Là encore, la mesure de la réponse impulsionnelle de la boucle de Costas donnerait une idée du retard qui serait observé lors de l’installation. Dans cette optique, l’équipement doit répondre à une exigence de 500 millisecondes pour le délai d’application et tenir compte de la réponse impulsionnelle de la solution de position.
- b) TSO-C129a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS utilisent un essai et/ou une analyse définis par le fabricant pour déterminer le temps de latence entre le moment où les mesures satellitaires sont rassemblées pour le traitement et le moment où l’équipement calcule une solution de position filtrée (réponse impulsionnelle). Les équipements doivent répondre à une exigence d’heure de mesure (TOM à heure d’applicabilité de 500 millisecondes et tenir compte de la réponse impulsionnelle de la solution de position.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.2.6 et 2.1.2.6.2.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.2.6, 2.1.2.6.2 et 2.1.5.8.2.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.2.6 et 2.1.2.6.2.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.2.6, 2.1.2.6.2 et 2.1.5.8.2.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-316, sections 2.1.2.6 et 2.1.2.6.2.
14) Précision de la vitesse. Le fabricant de la source de position GNSS doit fournir des données de conception pour aider l’installateur à régler le NACv. La mise à l’échelle de la précision de position GNSS rapportée (HFOM et VFOM) n’est pas un moyen acceptable pour déterminer la NACv.
- a) NACv = 1. Pour les installations destinées à prendre en charge la NACv = 1, le fabricant du GNSS doit effectuer les essais de vitesse prévus dans l’AC 20-138D, annexe 4, sections A4-1 à A4-8 de la FAA associés à NACv = 1. Le fabricant du GNSS doit indiquer que l’équipement satisfait aux exigences de NACv = 1 dans les instructions d’installation pour l’intégration de l’ADS-B.
- b) NACv = 2. Pour les installations destinées à prendre en charge la NACv = 2, le fabricant du GNSS doit effectuer les essais de vitesse prévus dans l’AC 20-138D, annexe 4, sections A4-1 à A4-9 de la FAA associés à NACv = 2. Le fabricant du GNSS doit présenter des données prouvant que l’équipement émet de manière dynamique des valeurs HFOM et VFOM (voir l’AC 20-138(), annexe 4, sections A4-5 et A4-8 et la FAA) et que les sorties de vitesse et de précision de l’équipement ont passé les essais de vitesse associés à NACv = 1 et NACv = 2. Le fabricant du GNSS doit indiquer que l’équipement satisfait aux exigences de NACv = 2 dans les instructions d’installation pour l’intégration de l’ADS-B.
- c) NACv = 3 ou 4. Aucune norme de performance n’a été élaborée pour soutenir NACv = 3 ou le NACv = 4. Une NACv = 3 ou NACv = 4 ne doit pas être réglée sur la base de la précision de la vitesse du GNSS, à moins que vous ne puissiez démontrer à TCAC que les contributions d’erreur ont été modélisées de manière adéquate pour atteindre ces niveaux de performance.
- d) TSO-C129. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification basées sur l’essai NACv = 1 et NACv = 2, selon le cas, et documentent la NACv dans les instructions d’installation pour l’intégration de l’ADS-B. Consultez l’AC 20-138(), annexe 4, section A4- 2d(3) de la FAA pour obtenir des conseils supplémentaires concernant l’utilisation de l’environnement sonore du document RTCA/DO-235B pour les essais de vitesse.
- e) TSO-C129a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification basées sur l’essai NACv = 1 et NACv = 2, selon le cas, et documentent la NACv dans les instructions d’installation pour l’intégration de l’ADS-B. Consultez l’AC 20-138(), annexe 4, section A4- 2d(3) de la FAA pour obtenir des conseils supplémentaires concernant l’utilisation de l’environnement sonore du document RTCA/DO-235 pour les essais de vitesse.
- f) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification basées sur l’essai NACv = 1 et NACv = 2, selon le cas, et documentent la NACv dans les instructions d’installation pour l’intégration de l’ADS-B.
- g) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification basées sur l’essai NACv = 1 et NACv = 2, selon le cas, et documentent la NACv dans les instructions d’installation pour l’intégration de l’ADS-B.
- h) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification basées sur l’essai NACv = 1 et NACv = 2, selon le cas, et documentent la NACv dans les instructions d’installation pour l’intégration de l’ADS-B.
- i) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification basées sur l’essai NACv = 1 et NACv = 2, selon le cas, et documentent la NACv dans les instructions d’installation pour l’intégration de l’ADS-B.
- j) TSO-C196/196a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification basées sur l’essai NACv = 1 et NACv = 2, selon le cas, et documentent la NACv dans les instructions d’installation pour l’intégration de l’ADS-B.
15) Précision de la position verticale. Le GNSS doit indiquer la précision de la position verticale. La précision verticale doit spécifier une limite de probabilité de 95 % pour la position verticale signalée. Aucune révision de l’instruction technique normalisée TSO-C129 ou TSO-C196 ne comporte d’exigences en matière de précision verticale ou d’intégrité, et les TSO-C145/146 ne comportent d’exigences en matière de précision verticale que pour certains modes d’approche. Aucune des TSO relatives au GNSS ne comporte d’exigence d’émission en continu des données relatives à la précision de la position verticale. Si la précision de la position verticale est fournie, elle doit avoir été qualifiée lors de l’approbation de la conception de la source de position.
- a) TSO-C129. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification avec la sortie VFOM basée sur l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10 de la FAA.
- b) TSO-C129a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification avec la sortie VFOM basée sur l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10 de la FAA.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification avec la sortie VFOM basée sur l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10 de la FAA.
- d) TSO-C145/146 rév. a, classe 2. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification avec la sortie VFOM basée sur l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10 de la FAA.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification avec la sortie VFOM basée sur l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10 de la FAA.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification avec la sortie VFOM basée sur l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10 de la FAA.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des données de justification avec la sortie VFOM basée sur l’essai décrit dans l’AC 20-138(), annexe 4, section A4-10 de la FAA.
16) Sortie de mode. Si l’interprétation de la sortie d’intégrité de la source de position peut changer en raison d’un changement de mode de la source de position, la source de position doit avoir un moyen de communiquer ce changement de mode à l’équipement ADS-B. En outre, le fabricant de la source de position doit fournir une description des modes et une description de la manière dont la source de position fournit l’indication de mode.
- a) TSO-C129. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant les modes disponibles (s’ils affectent l’interprétation de la sortie d’intégrité) et la manière dont la source de position fournit l’indication de mode (voir les limites d’intégrité de la position, paragraphe 55) de la présente section).
- b) TSO-C129a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant les modes disponibles (s’ils affectent l’interprétation de la sortie d’intégrité) et la manière dont la source de position fournit l’indication de mode (voir les limites d’intégrité de la position, paragraphe 55) de la présente section).
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant les modes disponibles (s’ils affectent l’interprétation de la sortie d’intégrité) et la manière dont la source de position fournit l’indication de mode (voir les limites d’intégrité de la position, paragraphe 55) de la présente section).
- d) TSO-C145/146 rév. a, classe 2. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant les modes disponibles (s’ils affectent l’interprétation de la sortie d’intégrité) et la manière dont la source de position fournit l’indication de mode (voir les limites d’intégrité de la position, paragraphe 55) de la présente section).
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant les modes disponibles (s’ils affectent l’interprétation de la sortie d’intégrité) et la manière dont la source de position fournit l’indication de mode (voir les limites d’intégrité de la position, paragraphe 55) de la présente section).
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant les modes disponibles (s’ils affectent l’interprétation de la sortie d’intégrité) et la manière dont la source de position fournit l’indication de mode (voir les limites d’intégrité de la position, paragraphe 55) de la présente section).
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant les modes disponibles (s’ils affectent l’interprétation de la sortie d’intégrité) et la manière dont la source de position fournit l’indication de mode (voir les limites d’intégrité de la position, paragraphe 55) de la présente section).
17) Intégrité du mode d’approche. Les équipements SBAS certifiés au titre d’une révision de la TSO-C145 ou TSO-C146 doivent avoir plusieurs modes de fonctionnement en fonction de la disponibilité de l’augmentation. Par exemple, lors d’un fonctionnement en mode augmenté destiné au guidage de l’approche LPV, la source de position peut déterminer le HPL sur la base d’une erreur latérale par rapport à une erreur horizontale et un temps d’exposition basé sur la durée de l’approche par rapport à l’heure de vol (voir RTCA/DO-229D, annexe J). Si la source de position fournit le HPL sur l’erreur latérale et le temps d’exposition à l’approche, il est possible que l’émetteur ADS-B doive gonfler le HPL de 3 % dans les modes d’approche pour s’assurer que l’intégrité est correctement délimitée. Les équipements GBAS doivent être conformes aux exigences du GNSS ou du SBAS pour la transmission des données de position. Il s’agit d’un problème d’intégration entre le GPS et l’émetteur ADS-B. Le fabricant de la source de position doit fournir des informations à l’intégrateur du système afin de déterminer si la sortie d’intégrité doit être mise à l’échelle (c’est-à-dire en appliquant un facteur d’inflation). Bien que nous n’abordions pas l’interface d’une source de position à correction différentielle GBAS dans le présent document, les considérations relatives aux modes d’approche seront similaires à celles du SBAS.
- a) TSO-C129. Ceci ne s’applique pas à la présente TSO puisqu’aucune mise à l’échelle du HPL n’est appliquée.
- b) TSO-C129a. Ceci ne s’applique pas à la présente TSO puisqu’aucune mise à l’échelle du HPL n’est appliquée.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.1.13.1 et 2.1.3.2.2.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229C, sections 2.1.1.13.1, 2.1.3.2.2, 2.1.4.2.2 et 2.1.5.2.2.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.1.13.1 et 2.1.3.2.2.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.1.13.1, 2.1.3.2.2, 2.1.4.2.2 et 2.1.5.2.2.
- g) TSO-C196/196a. Ceci ne s’applique pas à la présente TSO puisqu’aucune mise à l’échelle du HPL n’est appliquée.
18) Validité de l’angle de route-sol. Les sources de position GNSS peuvent fournir un angle de route-sol; cependant, l’angle de route-sol GNSS peut devenir invalide en dessous d’une certaine vitesse. Dans le meilleur des cas, la source de la position devrait invalider ou supprimer l’angle de route-sol lorsqu’il n’est plus valide. Si la source de position n’invalide pas l’angle de route-sol ou ne supprime pas l’angle de route-sol lorsqu’il est potentiellement invalide, le fabricant de la source de position doit fournir des informations sur les limitations de vitesse pour l’angle de route-sol du GNSS.
Note : Les niveaux d’interférence utilisés pour démontrer la conformité de la précision de la vitesse peuvent également être utilisés pour la validité de l’angle de route-sol.
- a) TSO-C129. Les moyens de conformité pour la TSO-C129 exigent que les fabricants de GNSS utilisent l’environnement d’essai et les conseils définis dans l’AC 20-138(), annexe 4, section 4-12 de la FAA. Il est recommandé aux fabricants d’utiliser l’annexe H du document RTCA/DO-229D pour l’émission de l’angle de route-sol (ARINC 743 toutes révisions confondues, étiquette 103) pour ceux qui utilisent les caractéristiques de l’ARINC 429.
- b) TSO-C129a. Les moyens de conformité pour la TSO-C129a exigent que les fabricants de GNSS utilisent l’environnement d’essai et les conseils définis dans l’AC 20-138(), annexe 4, section 4-12 de la FAA. Il est recommandé aux fabricants d’utiliser l’annexe H du document RTCA/DO-229D pour l’émission de l’angle de route-sol (ARINC 743 toutes révisions confondues, étiquette 103) pour ceux qui utilisent les caractéristiques de l’ARINC 429.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour la TSO-C145/146 rév. a, classe 1 exigent que les fabricants de GNSS utilisent l’environnement d’essai et les conseils définis dans l’AC 20-138(), annexe 4, section 4-12 de la FAA. Il est recommandé aux fabricants d’utiliser l’annexe H du document RTCA/DO-229C pour l’émission de l’angle de route-sol (ARINC 743 toutes révisions confondues, étiquette 103) pour ceux qui utilisent les caractéristiques de l’ARINC 429.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour la TSO-C145/146 rév. a, classe 2/3 exigent que les fabricants de GNSS utilisent l’environnement d’essai et les conseils définis dans l’AC 20-138(), annexe 4, section 4-12 de la FAA. Il est recommandé aux fabricants d’utiliser l’annexe H du document RTCA/DO-229C pour l’émission de l’angle de route-sol (ARINC 743 toutes révisions confondues, étiquette 103) pour ceux qui utilisent les caractéristiques de l’ARINC 429.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour la TSO-C145/146 rév. a, classe 1 exigent que les fabricants de GNSS utilisent l’environnement d’essai et les conseils définis dans l’AC 20-138(), annexe 4, section 4-12 de la FAA. Il est recommandé aux fabricants d’utiliser l’annexe H du document RTCA/DO-229D pour l’émission de l’angle de route-sol (ARINC 743 toutes révisions confondues, étiquette 103) pour ceux qui utilisent les caractéristiques de l’ARINC 429.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS utilisent l’environnement d’essai et les conseils définis dans l’AC 20-138(), annexe 4, section 4-12 de la FAA. Il est recommandé aux fabricants d’utiliser l’annexe H du document RTCA/DO-229D pour l’émission de l’angle de route-sol (ARINC 743 toutes révisions confondues, étiquette 103) pour ceux qui utilisent les caractéristiques de l’ARINC 429.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS qui optent pour l’essai ou l’analyse utilisent l’environnement d’essai et les conseils définis dans l’AC 20-138(), annexe 4, section 4-12 de la FAA. Il est recommandé aux fabricants d’utiliser l’annexe H du document RTCA/DO-316 pour l’émission de l’angle de route-sol (ARINC 743 toutes révisions confondues, étiquette 103) pour ceux qui utilisent les caractéristiques de l’ARINC 429.
19) Marque de temps. Les sources de position GNSS doivent émettre une marque de temps UTC identifiant l’heure d’applicabilité avec la sortie de position successive. Dans les capteurs modernes qui calculent et émettent la position plusieurs fois par seconde, ce repère temporel est généralement associé à une seule des sorties de position par seconde. La marque de temps peut être utilisée par l’équipement ADS-B pour réduire la latence non compensée. Cependant, pour les systèmes basés sur le 1090ES, l’émission de la marque de temps n’est pas nécessaire pour que les installations soient conformes aux règles. Certains GPS synchronisent le bord d’attaque de la marque de temps avec la seconde UTC. D’autres GPS laissent l’impulsion de la marque de temps être asynchrone par rapport à la seconde UTC et enregistrent ensuite l’heure du bord d’attaque dans les données numériques, en même temps que la solution de position.
- a) TSO-C129. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant la manière dont la marque de temps est liée à la position, à la vitesse, au FOM et à l’heure d’applicabilité.
- b) TSO-C129a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant la manière dont la marque de temps est liée à la position, à la vitesse, au FOM et à l’heure d’applicabilité.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant la manière dont la marque de temps est liée à la position, à la vitesse, au FOM et à l’heure d’applicabilité.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant la manière dont la marque de temps est liée à la position, à la vitesse, au FOM et à l’heure d’applicabilité.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant la manière dont la marque de temps est liée à la position, à la vitesse, au FOM et à l’heure d’applicabilité.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant la manière dont la marque de temps est liée à la position, à la vitesse, au FOM et à l’heure d’applicabilité.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO exigent que les fabricants de GNSS fournissent des instructions d’installation décrivant la manière dont la marque de temps est liée à la position, à la vitesse, au FOM et à l’heure d’applicabilité.
20) Détection des erreurs de SIS. La source de position doit permettre de détecter une erreur de SIS lorsque le système utilise un SIS. La probabilité d’une détection manquée pour un SIS défectueux doit être inférieure à 1x10-3. L’équipement GNSS fournit la détection d’erreur SIS appropriée.
- a) TSO-C129. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-208 modification 1, section 2.2.1.13.1, en référence au tableau 2-1 (voir le tableau 2-1, note D). Cependant, l’équipement prévu dans la TSO-C129 n’exige pas de détection de pas de pseudo-distance. Les fabricants de GNSS doivent donc fournir des données prouvant que leur algorithme RAIM inclut la détection de pas de pseudo-distance conformément à la TSO-C129a, section (a)(3)(xv)5.
- b) TSO-C129a. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-208 modification 1, section 2.2.1.13.1, en référence au tableau 2-1 (voir le tableau 2-1, note D) et la TSO-C129a, section (a)(3)(xv)5.
- c) TSO-C145/146 rév. a, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.1.3 et 2.1.1.5 pour le SBAS, section 2.1.1.2 pour le message de santé du GPS et section 2.1.2.2.2.2.2 pour la FDE.
- Note : Le SIS du SBAS comprend des informations sur la surveillance de l’état de santé et les défaillances, ce qui explique l’inclusion de ces exigences générales en matière de traitement des signaux.
- d) TSO-C145/146 rév. a, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.1.3 et 2.1.1.5 pour le SBAS, section 2.1.1.2 pour le message de santé du GPS et section 2.1.2.2.2.2.2 pour la FDE.
- Note : Le SIS du SBAS comprend des informations sur la surveillance de l’état de santé et les défaillances, ce qui explique l’inclusion de ces exigences générales en matière de traitement des signaux.
- e) TSO-C145/146 rév. b/c/d, classe 1. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.1.3 et 2.1.1.5 pour le SBAS, section 2.1.1.2 pour le message de santé du GPS et section 2.1.2.2.2.2.2 pour la FDE.
- Note : Le SIS du SBAS comprend des informations sur la surveillance de l’état de santé et les défaillances, ce qui explique l’inclusion de ces exigences générales en matière de traitement des signaux.
- f) TSO-C145/146 rév. b/c/d, classe 2/3. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-229D, sections 2.1.1.3 et 2.1.1.5 pour le SBAS, section 2.1.1.2 pour le message de santé du GPS et section 2.1.2.2.2.2.2 pour la FDE.
- Note : Le SIS du SBAS comprend des informations sur la surveillance de l’état de santé et les défaillances, ce qui explique l’inclusion de ces exigences générales en matière de traitement des signaux.
- g) TSO-C196/196a. Les moyens de conformité pour cette TSO sont définis dans le document RTCA/DO-316, sections 2.1.1.2, 2.1.1.3 et 2.1.2.2.2.2
5.0 Sources de position GNSS/IRS à configuration groupée.
La présente section fournit des orientations de haut niveau sur les questions qui devront être traitées pour qualifier un système mondial de navigation par satellite/système de référence inertielle (GNSS/IRS) à configuration groupée en vue de son utilisation dans un système ADS-B. Vous devez proposer à la FAA la méthode d’approbation d’un GNSS/IRS à configuration groupée pour son utilisation dans un système ADS-B.
1) Sorties GNSS/IRS à configuration groupée. Les sorties GNSS/IRS à configuration groupée doivent satisfaire aux exigences, y compris la validation, de l’annexe R du document RTCA/DO-229() ou de l’annexe R du document RTCA/DO-316.
2) Précision de la vitesse horizontale. Le système ADS-B doit tenir compte de la précision de la vitesse horizontale.
3) Performance du GNSS. Le capteur GNSS doit répondre aux exigences minimales de performance pour toute révision des instructions techniques normalisées TSO-C129, TSO-C145, TSO-C146, ou TSO-C196. En outre, le capteur GNSS doit satisfaire à toutes les exigences applicables en matière de GNSS de la présente annexe, le cas échéant.
4) Installation du GNSS. Installer le ou les capteurs GNSS conformément à l’AC 20-138() de la FAA.
5) Rayon de confinement NIC. La section 551.103 du chapitre 551 du MN exige un SIL = 3, ce qui signifie que la probabilité de dépasser le rayon de confinement NIC doit être inférieure à 1x10-7 par heure et par échantillon. Le système GNSS/IRS à configuration groupée doit transmettre la mesure de la qualité de l’intégrité sur une base horaire. Après la perte du GNSS ou du GNSS RAIM, le système hybride doit signaler le rayon de confinement de l’intégrité avec une probabilité de 1x10-7 sur une base horaire. Cela permettrait au système GNSS/IRS d’émettre avec une probabilité de 1x10-7 pendant une plus longue période.
- a) Le document RTCA/DO-229D, annexe R, section 2.1, exige que les systèmes à configuration groupée respectent deux limites d’intégrité. La limite d’intégrité pour le cas du satellite défaillant est de 1x10-7. La limite d’intégrité pour un cas sans défaut (rare et normal) est de 1x10-5. Le document RTCA/DO-229D, annexe R, section 2.1.1 reconnaît que, dans les systèmes étroitement intégrés, le vol libre inertiel peut faire en sorte que la limite normale rare soit dominante par rapport à la limite des conditions de défaillance lorsque la couverture satellitaire est faible. Si la sortie HPL de la source de position à configuration groupée passe d’une base de détection de défaut de 1x10-7 à une base sans défaut de 1x10-5, la source de position doit indiquer ce changement à l’équipement ADS-B. Nous recommandons que la source de position utilise une base d’intégrité de 1x10-7 dans tous les modes.
- b) Si la sortie de probabilité de confinement de l’intégrité de la source de position GNSS/IRS à configuration groupée passe d’une sortie par heure à une sortie par échantillon à la suite d’une perte de GNSS ou d’une perte de GNSS RAIM, la source de position doit indiquer ce changement à l’équipement ADS-B (c’est-à-dire, SILSUPP).
- c) Si le GNSS/IRS à configuration groupée met à l’échelle l’intégrité inertielle de 1x10-5 à 1x10-7, la mise à l’échelle doit avoir été démontrée lors de l’approbation de la conception de la source de position. Si la base inertielle est par échantillon et est mise à l’échelle par heure, cette mise à l’échelle doit avoir été démontrée lors de l’approbation de la conception de la source de position.
6) Performance d’intégrité du GNSS dans le manuel de vol. Si une source de position GNSS/IRS à configuration groupée est destinée à être utilisée comme source de position ADS-B après la perte du GNSS, il convient d’inclure dans le manuel de vol la performance en matière d’intégrité du vol libre. Les éléments suivants sont abordés de manière spécifique :
- a) Si le vol libre inertiel est conforme aux exigences de la section 551.103 du chapitre 551 du MN, par exemple NACp = 8, NIC = 7, SIL = 3 et SDA = 2.
- b) Durée estimée de la période suivant une perte de GNSS pendant laquelle le vol libre inertiel est censé satisfaire aux exigences de la section 551.103 du chapitre 551 du MN. L’estimation doit supposer que le système répondait aux exigences minimales de la section 551.103 du chapitre 551 du MN juste avant la perte du GNSS ou du GNSS RAIM. Cette estimation sera utile aux exploitants pour développer un moyen de s’assurer que le système peut répondre aux exigences de la section 551.103 du chapitre 551 du MN pendant les dégradations prévues du GNSS.
6.0 Sources de position autres que GNSS
TCAC n’a connaissance d’aucune source de position autre que GNSS actuellement disponible qui puisse satisfaire aux exigences de performance de la section 551.103 du chapitre 551 du MN. Cependant, vous pouvez souhaiter intégrer une capacité ADS-B Émission de secours en cas de perte du GNSS. Une telle capacité de secours n’est pas nécessaire. Nous ne prévoyons pas d’avantages opérationnels ATC pour les systèmes qui fournissent une capacité de secours autre que GNSS, à moins que cette capacité de secours ne réponde aux exigences de performance de la section 551.103 du chapitre 551 du MN. Cette section fournit des orientations de haut niveau sur les questions qui devront être traitées pour qualifier une source de position autre que GNSS en vue de son utilisation dans un système ADS-B sans tenir compte de la section 551.103 du chapitre 551 des exigences du MN. Si vous choisissez d’intégrer cette capacité, utilisez les conseils ci-dessous et proposez à TCAC la méthode d’approbation d’une source de position autre que GNSS pour une utilisation dans un système ADS-B.
1) Équipement de mesure de distance (DME/DME)
- a) Le système de navigation de surface DME/DME (RNAV) doit satisfaire aux exigences minimales de performance de la TSO-C66c, Distance Measuring Equipment (DME) Operating within the Radio Frequency Range of 960-1215 Megahertz.
- b) Il n’existe aucune norme industrielle concernant l’utilisation d’un système DME/DME pour déterminer l’intégrité de la position ou la précision de la vitesse. Vous devez proposer une méthode pour dériver ces paramètres.
- c) Le système DME/DME ne doit utiliser que les installations DME figurant dans le répertoire des aéroports et installations (A/FD).
- d) Le système DME/DME ne doit utiliser que des installations DME opérationnelles. Le système doit exclure les installations non opérationnelles en vérifiant l’identification. Les mesures d’atténuation opérationnelles, telles que l’exclusion manuelle (blackboulage) des stations DME ou toute action nécessitant l’intervention du pilote ou la surveillance du système DME/DME, ne sont pas autorisées pour les sources de position qualifiées ADS-B.
- e) Contrôles de vraisemblance. Le système DME/DME doit intégrer un contrôle de vraisemblance. Pour plus d’informations sur les contrôles de vraisemblance, se reporter à l’AC 90-100(), U.S. Terminal and En Route Area Navigation (RNAV) Operations de la FAA.
2) VOR/DME. Les sources de position ADS-B ne peuvent pas utiliser les informations du radiophare omnidirectionnel à très haute fréquence (VOR). N’interfacez aucune solution de position qui utilise des informations VOR, car les performances du VOR ne peuvent être présumées dans toute la région où le signal est reçu.
3) Système de navigation inertielle/unité de référence inertielle (INS/IRU) à configuration dispersée au DME ou au GNSS.
- a) L’équipement GNSS ou l’équipement DME doit satisfaire aux exigences de la présente annexe.
- b) L’équipement INS/IRU à configuration dispersée doit être conforme à l’article 604.46 du RAC.
- c) La source de position INS/IRU à configuration dispersée doit fournir toutes les sorties de source de position requises énumérées dans la présente annexe. Qualifiez les sorties lors de l’approbation de l’installation du système ADS-B; référez-vous à la section 3.0 de la présente annexe. La précision de la vitesse peut être qualifiée et réglée de manière statique. Actualisez dynamiquement les mesures de précision et d’intégrité de position.
- d) La section 551.103 du chapitre 551 du MN exige un SIL = 3, ce qui signifie que la probabilité de dépasser le rayon de confinement NIC doit être inférieure à 1x10-7 par heure et par échantillon. Un GNSS/IRS qui continue à fournir le rayon de confinement de l’intégrité basé sur une probabilité de 1x10-7 après la perte du GNSS ou du GNSS RAIM est préférable. Les erreurs potentielles, causées par la mise à jour du GNSS avant la perte du GNSS, doivent continuer à être liées.
- e) Si la sortie de probabilité de confinement de l’intégrité d’une source de position GNSS/IRS à configuration dispersée passe de 1x10-7 à 1x10-5 à la suite d’une perte de GNSS ou d’une perte de GNSS RAIM, la source de position doit relayer ce changement à l’équipement ADS-B. Le temps global du système pour transmettre un changement de SIL doit être inférieur ou égal à 10 secondes.
- f) Si la sortie de probabilité de confinement de l’intégrité de la source de position GNSS/IRS à configuration dispersée passe d’une sortie par heure à une sortie par échantillon à la suite d’une perte de GNSS ou d’une perte de GNSS RAIM, la source de position doit relayer ce changement à l’équipement ADS-B.
7.0 Sources de position futures
Les futures sources de position, telles que les sources GPS bi-fréquence et GPS/Galileo, devraient être des sources de position acceptables pour l’ADS-B et satisfaire aux exigences de performance de la section 551.103 du chapitre 551 du MN. Les futures révisions de la présente CI porteront sur la nouvelle technologie de source de position lorsqu’elle sera disponible.
Annexe C - Analyse de latence
1.0 But
1) L’objectif de cette annexe est de fournir des lignes directrices pour réaliser une analyse de latence sur votre système ADS-B.
2.0 Analyse
1) Effectuez l’analyse en déterminant les temps de latence applicables à chaque composante et en faisant le total de tous les temps de latence des composantes individuelles. Vous devez inclure toutes les sources de latence de position, y compris, mais sans s’y limiter : la source de position, les dispositifs intermédiaires entre la source de position et l’équipement ADS-B, et l’équipement ADS-B. Utilisez les lignes directrices suivantes pour déterminer la latence de chaque composante :
2) Considérations relatives à la latence de la source de position
En général, l’information sur la latence doit être générée par le fabricant de la source de position et présentée dans le cadre de l’analyse de latence. La mesure du temps de latence doit commencer au TOM et se terminer lorsque la position est émise par la source de position.
- a) GNSS TSO-C145, TSO-C146 et TSO-C196. Utilisez les normes de latence des TSO dans l’analyse de latence ou utilisez les informations de latence réelles générées par le fabricant GNSS pour déterminer la latence totale maximale de la source de position et la latence non compensée. Si l’équipement GNSS est classifié en classe 3 conformément à une révision de la TSO-C145, les normes de latence sont plus strictes pour les modes LPV. Si la norme de classe 3 est appliquée dans tous les modes, les chiffres de latence les plus stricts peuvent être utilisés; toutefois, si les normes de latence les plus strictes ne sont respectées qu’en mode d’approche, utilisez la latence la plus défavorable dans tous les modes.
- b) GNSS TSO-C129. Il n’existe pas de normes de latence pour une quelconque révision de l’équipement GNSS TSO-C129. Les informations relatives à la latence doivent être générées par le fabricant du GNSS et incluses dans l’analyse de latence.
- c) GNSS/inertiel à configuration groupée. Il n’existe pas de normes de latence pour les équipements GNSS/inertiels à configuration groupée. L’information sur la latence totale et non compensée doit être générée par le fabricant de la source de position et présentée dans le cadre de l’analyse de latence. Basez l’analyse de latence sur le taux de mise à jour du capteur inertiel, étant donné que des mises à jour du GNSS de 10 ou 20 secondes vers le capteur inertiel n’ont pas d’impact sur la latence de la sortie de position. Cependant, la latence de mise à jour du GNSS affecte la précision de la position et doit être reflétée de manière appropriée dans la sortie de précision de la source de position.
- d) Autres sources de position. L’information sur la latence totale et non compensée doit être générée par le fabricant de la source de position et être incluse dans l’analyse de latence.
3) Dispositif intermédiaire. Les dispositifs intermédiaires sont généralement des concentrateurs de données. L’information sur la latence doit être générée par le fabricant du dispositif intermédiaire et présentée dans le cadre de l’analyse de latence. Si la latence du dispositif intermédiaire est variable, utilisez la latence la plus défavorable.
4) Équipement ADS-B. Utilisez les normes de latence des TSO-C166b et TSO-C154c pour l’analyse de latence ou utilisez les informations de latence réelles générées par le fabricant de l’équipement ADS-B. Les instructions techniques normalisées TSO-C166b et TSO-C154c exigent que la latence non compensée de l’équipement ADS-B soit inférieure à 100 ms.
5) Délai asynchrone. L’analyse du temps de latence totale doit inclure le retard asynchrone maximal causé par les mises à jour de position arrivant à l’équipement ADS-B en décalage par rapport au moment où le système ADS-B transmet la position. Ce délai est un facteur du taux de mise à jour de la source de position plutôt que du taux de transmission de l’équipement ADS-B. Par exemple, une source de position de 1 Hz pourrait fournir une mise à jour de la position immédiatement après une transmission de position ADS-B. Cette position sera extrapolée, jusqu’à une seconde, jusqu’à ce que la prochaine mise à jour de la position arrive de la source de position. Ainsi, une source de position de 1 Hz peut introduire 1 seconde de latence totale. Cette seconde doit être incluse dans le calcul de la latence totale.
3.0 Budget de latence de l’équipement
1) Source de position. Nous recommandons d’utiliser des sources de position pour lesquelles la latence de la position, la vitesse et les mesures de précision de la position sont inférieures ou égales à 500 ms entre la TOM de la position et l’heure d’applicabilité de la position, et pour lesquelles la position est émise en moins de 200 ms après l’heure d’applicabilité de la position.
Note : Toutes les révisions des équipements relatifs aux TSO-C145, TSO-C146 et TSO-C196 sont conformes à ces recommandations.
2) Source de position à l’interface ADS-B. La connexion directe de la source de position à l’équipement ADS-B est la méthode d’installation préférée. Si cette architecture n’est pas utilisée, nous recommandons que toute latence introduite entre la sortie de la source de position et l’entrée de l’équipement ADS-B soit inférieure à 100 ms (voir RTCA/DO-260B, annexe U).
3) Équipement ADS-B. Les exigences en matière de latence pour l’équipement ADS-B sont incluses dans la TSO-C166b et permettent à l’équipement ADS-B de ne pas introduire plus de 100 ms de latence non compensée. La TSO-C166b est requise par la section 551.103 du chapitre 551 du MN.
4.0 Problèmes généraux de latence
1) Recommandations pour réduire la latence.
- a) Connectez directement la source de position à l’équipement ADS-B.
- b) Utilisez une source de position TSO-C145, TSO-C146 ou TSO-C196 (toute révision).
- c) Utilisez une source de position qui fournit des mises à jour de position supérieures à 1 Hz.
- d) Utiliser la marque de temps GNSS dans les systèmes TSO-C166b pour réduire la latence non compensée de la source de position et du dispositif intermédiaire.
2) Applicabilité de la latence. L’exigence de latence totale de 2,0 secondes s’applique à la position de l’aéronef (latitude et longitude), à la vitesse et à la mesure de la précision de la vitesse (NACV). L’exigence de latence non compensée de 0,6 seconde ne s’applique qu’à la position de l’aéronef (latitude et longitude).
3) Latence moyenne par rapport à latence maximale. Dans les cas où la latence est variable, il convient d’utiliser dans l’analyse la latence la plus défavorable dans des conditions exemptes de défaut. Une latence variable, par exemple, peut être due à des variations dans le chargement d’un concentrateur de données ou à la nature asynchrone d’une interface GNSS vers ADS-B. En tant que demandeur, vous devez proposer à TCAC la manière de traiter les latences variables introduites par des dispositifs intermédiaires tels que les concentrateurs de données.
4) Compenser la latence des interfaces dans les systèmes non synchronisés. Il est acceptable d’installer un équipement ADS-B qui compense la latence qui se produit en dehors de l’équipement ADS-B, même si la source de position et l’équipement ADS-B ne sont pas synchronisés dans le temps. L’établissement des corrections appropriées pour la latence externe est problématique car l’équipement TSO-C166b peut être interfacé avec de nombreuses architectures d’aéronefs différentes. Ces architectures pourraient inclure différentes sources de position, avec différents temps de latence, ainsi que différents concentrateurs de données avec différents délais. Pour interfacer des équipements ADS-B non synchronisés qui compensent les latences externes, le fabricant d’équipements ADS-B doit fournir une liste des équipements et des architectures acceptables. En règle générale, ce type d’équipement ADS-B ne sera installé que dans des architectures étroitement intégrées. Vous ne pouvez pas tenter d’intégrer un équipement ADS-B qui compense les latences externes à moins que le fabricant de l’équipement ADS-B n’ait expressément documenté l’architecture de l’installation et que les données de conception ne soient disponibles pour chaque composante. Le temps total qui peut être utilisé pour la compensation est toujours limité par l’exigence de limiter le temps de latence totale à 2,0 secondes.
5) Surcompensation. Il est possible que les algorithmes de compensation « surcompensent » les effets de la latence, en transmettant essentiellement une position qui se trouve devant la position réelle de l’aéronef plutôt que derrière. Ce type de système est acceptable tant que la position transmise n’est pas plus avancée que 200 ms (voir RTCA/DO-260B, annexe U).
6) Extrapolation en cas de perte des données de position. Les équipements TSO-C166b conformes à RTCA/DO-260B, sections 2.2.3.2.3.7.4 et 2.2.3.2.3.8.4, autorisent l’extrapolation de la position jusqu’à 2 secondes lorsque les données de position ne sont pas disponibles auprès de la source de position. Cette tolérance concerne le cas où les données de position sont perdues pour un seul échantillon et ne doit pas être prise en compte dans le calcul du temps de latence totale, à condition qu’il s’agisse d’une condition non normale. Si les données de position sont perdues, plusieurs mises à jour de position pourraient dépasser l’exigence de latence, mais la position serait alors invalidée dans les 2 secondes, conformément à la TSO-C166b.
7) Synchronisation de l’époque UTC. La position transmise par l’équipement ADS-B peut être alignée sur une époque UTC. L’instruction technique normalisée TSO-C166b permet aux systèmes 1090ES d’extrapoler à l’époque UTC de 0,2 seconde ou de transmettre de manière asynchrone. Pour synchroniser la sortie de position avec l’époque UTC, la source de position doit fournir une marque de temps. L’équipement ADS-B utilise ce repère temporel pour extrapoler la position à l’époque UTC. En règle générale, la marque de temps provient d’une source de position GNSS. La mise en œuvre de la synchronisation temporelle dans les systèmes 1090ES permettra de minimiser la latence non compensée.
8) Points de mesure de la latence. La latence est définie comme le temps qui s’écoule entre le moment où la position est mesurée par la source de position et le moment où elle est transmise par l’équipement ADS-B.
- a) Moment de mesure (TOM). L’analyse de latence commence au moment de mesure de la source de position. Le moment de mesure de la source de position pour les sources GNSS est le moment où le dernier signal GNSS utilisé pour déterminer la position arrive à l’antenne GNSS de l’aéronef. Pour une source de position inertielle ou une source de position inertielle assistée par GNSS, la valeur TOM est l’heure de la dernière mesure de l’accéléromètre. Pour un système RNAV utilisant plusieurs signaux DME, le TOM correspond à l’heure à laquelle le dernier signal DME arrive à l’antenne DME de l’aéronef.
- Note : Pour démontrer la conformité avec la section 551.103 du chapitre 551 du MN, vous devez calculer la latence à partir du moment de mesure (TOM) de la source de position. Ne calculez pas la latence à partir de l’heure d’applicabilité de la source de position, telle que définie dans le document RTCA/DO-260B avec le rectificatif 1 et le document RTCA/DO-282B avec le rectificatif 1.
- b) Moment d’applicabilité de la transmission. Le moment de la transmission est l’heure à laquelle le système ADS-B diffuse la position. L’heure d’applicabilité de la position transmise pour les systèmes synchronisés est l’époque UTC appropriée. L’heure d’applicabilité de la position transmise pour les systèmes non synchronisés est l’heure réelle à laquelle l’équipement ADS-B commence à transmettre le message contenant la position.
- Note : Les systèmes ADS-B synchronisés font varier aléatoirement la transmission de la position autour de l’époque UTC afin d’éviter les interférences avec d’autres émetteurs ADS-B. Cette randomisation ne doit pas être incluse dans l’analyse de latence.
9) Modifications mineures de la définition de type de source de position. Si l’installation ADS-B repose sur la performance de latence de la source de position, plutôt que sur une norme de latence TSO, l’installateur du système ADS-B doit mettre à jour l’IMN pour la source de position avec un processus qui garantit le maintien de la navigabilité du système ADS-B après des modifications de conception de la source de position.
5.0 Exemple d’analyse de latence
1) Cet exemple utilise un GNSS répondant aux exigences minimales de performance de l’instruction technique normalisée TSO-C145 (toute révision) directement connecté à un équipement ADS-B TSO-C166b. Cette installation est une installation T = 0; elle est donc non synchronisée. L’exemple du Tableau 22 est considéré comme une architecture conforme.
|
Élément |
Latence non compensée |
Latence compensée |
Latence totale |
Remarques |
|---|---|---|---|---|
|
Source de position |
≤ 200 ms |
≤ 500 ms
|
≤ 700 ms
|
|
|
Source de position Source de position |
0 |
0
|
0
|
Directement connecté |
|
Équipement ADS-B |
≤ 100 ms |
Remarque 1
|
≤ 100 ms
|
|
|
Délai asynchrone |
0 |
≤ 1,0 s
|
≤ 1,0 s
|
Source de position 1 Hz |
|
Total |
≤ 300 ms |
≤ 1,5 s
|
≤ 1,8 s
|
|
Note 1 : La latence compensée de l’équipement ADS-B est limitée par la nature asynchrone de la livraison de la source de position et de la transmission du système ADS-B. Ainsi, la latence compensée par l’équipement ADS-B est incluse dans la ligne de délai asynchrone.
Note 2 : La latence entre le TOM de source de position et l’heure d’applicabilité de la source de position doit être compensée par toutes les révisions de TSO-C145, TSO-C146 et TSO-C196.
Annexe D - Comparaison entre la CI 500-029, édition 2, de TCAC et l’AC 20-165B de la FAA
Le tableau suivant vise à faciliter la compréhension des différences entre les mandats ADS-B en vigueur au Canada, aux États-Unis d’Amérique et en Europe.
|
Paramètre |
TCAC – |
FAA – |
AESA – |
|---|---|---|---|
|
Adresse 24 bits OACI de l’aéronef |
O |
O |
O |
|
Position horizontale gouvernes (latitude et longitude) |
O |
O |
|
|
Identification de position spéciale |
N |
N |
O |
|
État d’urgence. |
O |
O |
O |
|
Identification de l’aéronef (ID de vol ou numéro d’immatriculation) |
O |
O |
O |
|
Position horizontale en vol (latitude, longitude) |
O |
O |
O |
|
Altitude-pression barométrique |
O |
O |
O |
|
IDENT du transpondeur (en cours d’utilisation) |
O |
O |
N |
|
Catégorie d’émetteurs |
O |
O |
O |
|
Altitude géométrique (hauteur GNSS) |
O (RVSM uniquement) |
O |
O |
|
Angle de route-sol |
N |
N |
O |
|
Vitesse horizontale en vol |
O |
O |
O |
|
Vitesse sol gouvernes |
O |
O |
O |
|
Longueur et largeur de l’aéronef |
O |
O |
O |
|
Code de transporteur de mode 3/A |
O |
O |
O |
|
Catégorie d’intégrité de navigation (NIC) |
O |
O |
O |
|
Catégorie de précision de navigation pour position (NACp) |
O |
O |
O |
|
Catégorie de précision de navigation pour la vitesse (NACv) |
O |
O |
O |
|
Niveau d’intégrité de source (SIL) |
O |
O |
O |
|
Assurance de la conception du système (SDA) |
O |
O |
O |
|
Numéro de version |
O |
N |
O |
|
TCAS installé et opérationnel |
O |
O |
N |
|
État du trafic TCAS |
O |
O |
O |
|
Données sur le taux vertical |
N |
N |
O |
|
Décalage d’antenne GNSS |
N |
N |
O (antenne GPS) |
|
Précision géométrique verticale (GVA) |
N |
N |
O |
|
Altitude sélectionnée |
O (si disponible) |
N |
O (si disponible) |
|
Réglage de la pression barométrique |
O (si disponible) |
N |
O (si disponible) |
|
Capacité ADS-B Réception |
N |
O |
N |
O = obligatoire ; N = non obligatoire/facultatif
Annexe E - Comparaison entre la CI 500-029, édition 2, de TCAC et l’AC 20-165B de la FAA
| Référence à la CI 500-029, édition 2, de TCAC |
Comparaison |
|
|---|---|---|
|
1 |
Introduction |
Spécifique à la CI de TCAC. |
|
1.1 |
But |
Spécifique à la CI de TCAC. |
|
1.2 |
Applicabilité |
Spécifique à la CI de TCAC. |
|
1.3 |
Description des modifications |
Spécifique à la CI de TCAC. |
|
2 |
Références et exigences |
Spécifique à la CI de TCAC. |
|
2.1 |
Documents de référence |
Spécifique à la CI de TCAC. |
|
2.2 |
Documents annulés |
Spécifique à la CI de TCAC. |
|
2.3 |
Définitions et abréviations |
Spécifique à la CI de TCAC. |
|
3 |
Contexte |
Comprend le système SB. |
|
3.1 |
ADS-B Émission |
Comprend le système SB. |
|
3.2 |
Notes sur l’émetteur-récepteur d’accès universel (UAT) ADS-B Réception et ADS-B Émission |
Comprend le système SB. |
|
4 |
Documentation nécessaire |
Spécifique à la CI de TCAC. |
|
4.1 |
Notes générales |
Spécifique à la CI de TCAC. |
|
4.2 |
Manuel de vol d’aéronef |
Aucune différence significative. |
|
4.3 |
Instructions de maintien de la navigabilité |
Aucune différence significative. |
|
4.4 |
Listes principales d’équipement minimal (MMEL) |
Section supplémentaire. |
|
5 |
Directives d’installation du système ADS-B Émission |
Spécifique à la CI de TCAC. |
|
5.1 |
Directives générales sur l’installation |
L’AC de la FAA nécessite des changements de NAC, SDA, SIL dans les 10 s. |
|
5.2 |
Équipement ADS-B |
L’AC de la FAA accepte les équipements UAT pour certaines classes d’espace aérien; les paramètres requis sont différents. Consultez l’annexe D pour une comparaison détaillée. |
|
5.3 |
Source de position |
Aucune différence, sauf que l’AC de la FAA mentionne la TSO-C154c pour les installations UAT. |
|
5.4 |
Source d’altitude barométrique |
Aucune différence significative. |
|
5.5 |
Source de cap |
Aucune différence significative. |
|
5.6 |
Source TCAS |
Aucune différence significative. |
|
5.7 |
Interface pilote |
Aucune différence significative. |
|
5.8 |
Interface antenne ADS-B |
L’AC de la FAA mentionne les installations UAT; l’AC de la FAA ne différencie pas les transmissions SB; l’AC de la FAA exige une fixation inférieure pour les antennes uniques. |
|
5.9 |
Source de taux vertical |
Aucune différence significative. |
|
5.10 |
Considérations air-sol |
Aucune différence significative. |
|
5.11 |
Exigences relatives à l’espace aérien étranger |
Paramètres différents. Consultez l’annexe D pour une comparaison détaillée. |
|
6 |
Moyens de conformité |
L’AC de la FAA ne définit pas les exigences de transmission d’une seule antenne pour les systèmes SB; TCAC définit le tableau des moyens de conformité acceptés en tenant compte des types d’installation d’antennes. |
|
6.1 |
Vue d’ensemble des moyens de conformité |
Spécifique à la CI de TCAC. |
|
6.2 |
Essais de base au sol |
Aucune différence significative. |
|
6.3 |
Essais de performances d’antenne au sol |
Nouvelle section complète dans la CI de TCAC. |
|
6.4 |
Essai en vol de bout en bout |
Mesures différentes pour les critères de réussite/échec. |
|
6.5 |
Réutilisation ultérieure des données |
Aucune différence significative. |
|
7 |
Historique du document |
Spécifique à la CI de TCAC. |
|
8 |
Communiquez avec nous |
Spécifique à la CI de TCAC. |
|
ANNEXE A |
DESCRIPTION DES ÉLÉMENTS DE MESSAGE |
Aucune différence significative. |
|
ANNEXE B |
IDENTIFICATION ET LA QUALIFICATION DES SOURCES DE POSITION ADS-B |
Aucune différence significative. |
|
ANNEXE C |
ANALYSE DE LATENCE |
Aucune différence significative. |
|
ANNEXE D |
Comparaison des paramètres ADS-B Émission TCAC/FAA/AESA |
S.O. |